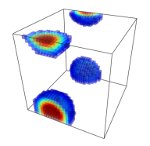
Dr.-Ing. Peer Neubert
News and recent events
- In October'22 I became a professor at the University in Koblenz.
- Our paper SEER: Unsupervised and sample-efficient environment specialization of image descriptors has been accepted for RSS'22.
- Our paper HDC-MiniROCKET: Explicit Time Encoding in Time Series Classification with Hyperdimensional Computing has been accepted for IJCNN'22.
- Our paper A comparison of Vector Symbolic Architectures has been accepted for Springer Artificial Intelligence Review journal. Congratulations to the first author Kenny Schlegel!
- I've been nominated for the Heinz Maier-Leibnitz Preis 2022 (Deutsche Forschungsgemeinschaft).
- Both submissions for RSS'21 have been accepted. My own paper "Vector Semantic Representations as Descriptors for Visual Place Recognition" and Stefan Schubert's paper (co-authored by me) "Fast and Memory Efficient Graph Optimization via ICM for Visual Place Recognition".
- I'm co-author of a paper by Kenny Schlegel and Florian Mirus (BMW) on Multivariate Time Series Analysis for Driving Style Classification using Neural Networks and Hyperdimensional Computing that was accepted at IEEE IV'21.
- The paper Hyperdimensional computing as a framework for systematic aggregation of image descriptors co-oauthored with Stefan Schubert was accepted for CVPR'21.
- All three papers that I co-authored have been accepted for ICRA'21: Stefan Schubert's paper "Beyond ANN: Exploiting Structural Knowledge for Efficient Place Recognition", Fangming Yuan's paper "SoftMP: Attentive feature pooling for joint local feature detection and description for place recognition in changing environments", and my own combined RA-L/ICRA paper below. Congratulation and many thanks to Stefan and Fangming!
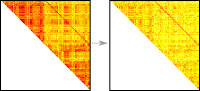
- The paper "Resolving Place Recognition Inconsistencies Using Intra-Set Similarities" together with Stefan Schubert and Peter Protzel will appear in IEEE RA-L'21.
- I'm co-author of Stefan Schubert's paper "Graph-based Non-Linear Least Squares Optimization for Visual Place Recognition in Changing Environments" that will appear in IEEE RA-L'21.
We organized a free online tutorial on Vector Symbolic Architectures at the European Conference on Artificial Intelligence 2020 (ECAI). More information, slides, and code can be found on our tutorial website.
Research Interests
My research interests are in the fields of autonomus robotis asn systems as well as artificial intelligence. I use computer vision and machine learning as tools within these fields. I have particular experience in the areas of place recognition in changing environments, hand crafted and deep-learned visual features, mobile robot navigation, biologically inspired perception and navigation approaches, as well as hyperdimensional computing. Details on my research can be found in the list of publications or here:- Vector Symbolic Architectures
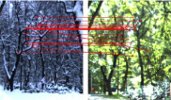
- Place Recognition in Changing Environments
- Superpixel Segmentations
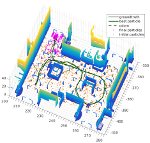
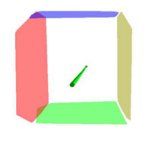
- Camera-based Navigation in (semantic) 3D Maps
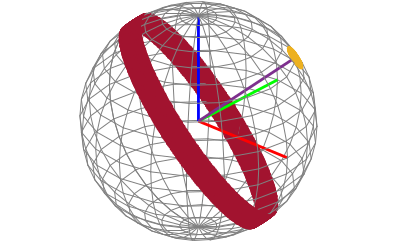
- Circular Convolutional Neural Networks (CCNNs)
- How to Build and Customize a High-Resolution 3D Laserscanner Using Off-the-shelf Components
- Robotic Systems


Publications

(2022) SEER: Unsupervised and sample-efficient environment specialization of image descriptors. In Proc. of Robotics: Science and Systems (RSS). DOI: 10.15607/RSS.2022.XVIII.006
(2022) HDC-MiniROCKET: Explicit Time Encoding in Time Series Classification with Hyperdimensional Computing. In Proc. of International Joint Conference on Neural Networks (IJCNN). DOI: 10.1109/IJCNN55064.2022.9892158
(2021) A comparison of Vector Symbolic Architectures. Artificial Intelligence Review. DOI: 10.1007/s10462-021-10110-3
(2021) Vector Semantic Representations as Descriptors for Visual Place Recognition. In Proc. of Robotics: Science and Systems (RSS). DOI: 10.15607/RSS.2021.XVII.083
(2021) Fast and Memory Efficient Graph Optimization via ICM for Visual Place Recognition. In Proc. of Robotics: Science and Systems (RSS). DOI: 10.15607/RSS.2021.XVII.091
(2021) Hyperdimensional computing as a framework for systematic aggregation of image descriptors. In Proc. of IEEE Conference on Computer Vision and Pattern Recognition (CVPR). DOI: 10.1109/CVPR46437.2021.01666
(2021) Multivariate Time Series Analysis for Driving Style Classification using Neural Networks and Hyperdimensional Computing. In Proc. of Intelligent Vehicles Symposium (IV). DOI: 10.1109/IV48863.2021.9576028
(2021) Beyond ANN: Exploiting Structural Knowledge for Efficient Place Recognition. In Proc. of Intl. Conf. on Robotics and Automation (ICRA). DOI: 10.1109/ICRA48506.2021.9561006
(2021) SoftMP: Attentive feature pooling for joint local feature detection and description for place recognition in changing environments. In Proc. of Intl. Conf. on Robotics and Automation (ICRA). DOI: 10.1109/ICRA48506.2021.9562087
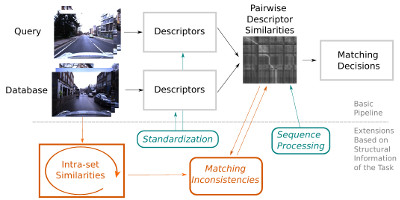
(2021) Resolving Place Recognition Inconsistencies Using Intra-Set Similarities. IEEE Robotics and Automation Letters (RA-L) and ICRA. DOI: 10.1109/LRA.2021.3060729
(2021) Graph-based Non-Linear Least Squares Optimization for Visual Place Recognition in Changing Environments. In IEEE Robotics and Automation Letters (RA-L). DOI: 10.1109/LRA.2021.3052446
(2020) Unsupervised Learning Methods for Visual Place Recognition in Discretely and Continuously Changing Environments. In Proc. of Intl. Conf. on Robotics and Automation (ICRA). DOI: 10.1109/ICRA40945.2020.9197044
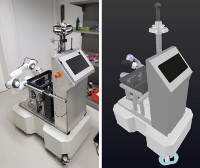
(2020) Building a navigation system for a shopping assistant robot from off-the-shelf components. In Proc. of Towards Autonomous Robotic Systems Conference (TAROS). DOI: 10.1007/978-3-030-63486-5_13

(2020) LocalSPED: A classification pipeline that can learn local features for place recognition using a small training set. In Proc. of Towards Autonomous Robotic Systems Conference (TAROS). DOI: 10.1007/978-3-030-63486-5_23
(2020) Experiences and Open Questions on using Vector Symbolic Architectures for Mobile Robotics. In Workshop on Developments in Hyperdimensional Computing and Vector Symbolic Architectures. (to appear)

(2019) An Introduction to Hyperdimensional Computing for Robotics. KI - Künstliche Intelligenz, Special Issue: Reintegrating Artificial Intelligence and Robotics, Vol. 33. DOI: 10.1007/s13218-019-00623-z
(2019) A neurologically inspired sequence processing model for mobile robot place recognition. In IEEE Robotics and Automation Letters (RA-L) and presentation at Intl. Conf. on Intelligent Robots and Systems (IROS). DOI: 10.1109/LRA.2019.2927096
(2019) Towards combining a neocortex model with entorhinal grid cells for mobile robot localization. In Proc. of European Conference on Mobile Robotics (ECMR). DOI: 10.1109/ECMR.2019.8870939

(2019) Circular Convolutional Neural Networks for Panoramic Images and Laser Data. In Proc. of Intelligent Vehicles Symposium (IV). DOI: 10.1109/IVS.2019.8813862
(2018) A Sequence-Based Neuronal Model for Mobile Robot Localization. In Proc. of German Conference on Artificial Intelligence (KI). DOI: 10.1007/978-3-030-00111-7_11
(2018) Towards Hypervector Representations for Learning and Planning with Schemas. In Proc. of German Conference on Artificial Intelligence (KI)
(2017) Sampling-based Methods for Visual Navigation in 3D Maps by Synthesizing Depth Images. In Proc. of Intl. Conf. on Intelligent Robots and Systems (IROS). DOI: 10.1109/IROS.2017.8206067

(2017) Synthesized semantic views for mobile robot localization. In Proc. of European Conf. on Mobile Robotics (ECMR). DOI: 10.1109/ECMR.2017.8098662

(2017) Towards camera based navigation in 3D maps by synthesizing depth images. In Proc. of Towards Autonomous Robotic Systems (TAROS). DOI: 10.1007/978-3-319-64107-2_49. Best Paper Award Winner
(2016) Image features for visual teach-and-repeat navigation in changing environments. In Robotics and Autonomous Systems. DOI: 10.1016/j.robot.2016.11.011
(2016) Learning Vector Symbolic Architectures for Reactive Robot Behaviours. In Proc. of Intl. Conf. on Intelligent Robots and Systems (IROS) Workshop on Machine Learning Methods for High-Level Cognitive Capabilities in Robotics

(2016) Map Enhancement with Track-Loss Data in Visual SLAM. In Proc. of Intl. Conf. on Intelligent Robots and Systems (IROS) Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots

(2016) Beyond Holistic Descriptors, Keypoints and Fixed Patches: Multiscale Superpixel Grids for Place Recognition in Changing Environments. In IEEE Robotics and Automation Letters and presentation at Intl. Conf. on Robotics and Automation (ICRA)

(2016) How to Build and Customize a High-Resolution 3D Laserscanner Using Off-the-shelf Components. In Proc. of Towards Autonomous Robotic Systems (TAROS). DOI: 10.1007/978-3-319-40379-3_33. Best Paper Award Winner

(2015) Superpixels and their Application for Visual Place Recognition in Changing Environments. Dissertation: TU Chemnitz

(2015) Local Region Detector + CNN based Landmarks for Practical Place Recognition in Changing Environments. In Proc of. European Conf. on Mobile Robotics (ECMR)

(2015) Benchmarking Superpixel Descriptors. In Proc. of European Signal Processing Conference (EUSIPCO)
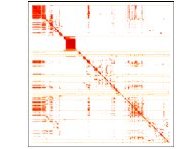
(2015) Exploiting intra Database Similarities for Selection of Place Recognition Candidates in Changing Environments. In Proc. of. Computer Vision and Pattern Recognition (CVPR) Workshop on Visual Place Recognition in Changing Environments
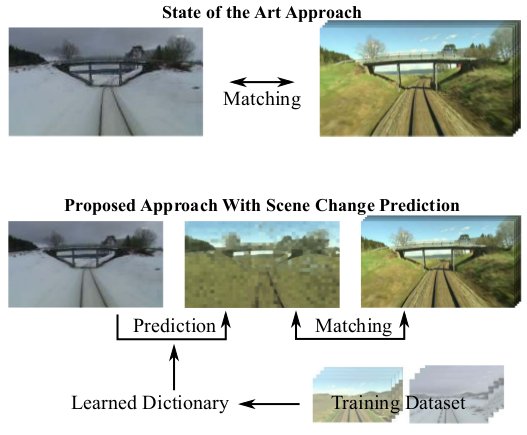
(2015) Superpixel-based appearance change prediction for long-term navigation across seasons. Robotics and Autonomous Systems, Vol. 69:15-27. DOI: 10.1016/j.robot.2014.08.005
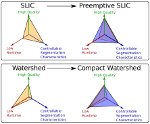
(2014) Compact Watershed and Preemptive SLIC: On improving trade-offs of superpixel segmentation algorithms. In Proc. of Intl. Conf. on Pattern Recognition (ICPR)

(2014) Phobos and Deimos on Mars — Two Autonomous Robots for the DLR SpaceBot Cup. In Proc. of Intl. Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS)

(2013) Evaluating Superpixels in Video: Metrics Beyond Figure-Ground Segmentation.. In Proc. of British Machine Vision Conference (BMVC)

(2013) Appearance Change Prediction for Long-Term Navigation Across Seasons. In Proc. of European Conference on Mobile Robotics (ECMR)

(2013) Predicting the Change -- A Step Towards Life-Long Operation in Everyday Environments. In Proc. of Robotics: Science and Systems (RSS) Robotics Challenges and Vision Workshop. RCV 2013 3rd Best Paper Award Winner

(2013) Are We There Yet? Challenging SeqSLAM on a 3000 km Journey Across All Four Seasons. In Proc. of Workshop on Long-Term Autonomy at Int. Conf. on Rob. a. Autom. (ICRA)
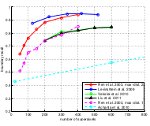
(2012) Superpixel Benchmark and Comparison. In Proc. of Forum Bildverarbeitung

(2012) From Saliency Based Image Features Towards Semantic Mapping. In Proc. of 7th German Conference on Robotics, pages 1-6
(2011) Autonomous Corridor Flight of a UAV Using a Low-Cost and Light-Weight RGB-D Camera. In Advances in Autonomous Mini Robots - Proceedings of the 6-th AMiRE Symposium, pages 183-192. ISBN: 978-3-642-27481-7. DOI: 10.1007/978-3-642-27482-4_19
(2010) The Causal Update Filter -- A Novel Biologically Inspired Filter Paradigm for Appearance Based SLAM. In Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS). DOI: 10.1109/IROS.2010.5653221
(2008) A Fast Visual Line Segment Tracker. In Proc. of 13th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)

(2007) FastSLAM using SURF Features: An Efficient Implementation and Practical Experiences. In Proceedings of the International Conference on Intelligent and Autonomous Vehicles, IAV07