Our robots from 2000 until today
This timeline shows all the robots we have worked with starting from the year 2000 until today. The robots fall into three categories:
- Mobile ground robots especially suited for outdoor robotics research in unstructured 3D environments. This includes our early robots (Hans, Franz, RobuCar) as well as our current robots used for the SpaceBot Cup.
- Unmanned Aerial Systems aka flying robots. Before quadcopters (Micro Aerial Vehicles - MAV) became available for research, we worked with autonomous airships (blimps) with the goal of providing sensor coverage in emergency situations like large floods or fires. The later work with MAVs focused on indoor flight (no GPS/GNSS, real-time navigation with obstacles).
- Small (30 cm) robots for our undergraduate lab course in mobile robotics. This course is actually a robot competition, where two robots have to navigate through an unknown 2m x 2m maze and within 7 minutes find and switch as many light beacons as possible.
While we usually purchased the basic platforms, much effort and expertise went into outfitting the robots with various sensors, actuators, and computing equipment before we could actually use them for their intended purposes.

2019
In continuation to our lab course with the "TUC-Bots" (see below), we developed and built the "TUCar" for subsequent teaching purposes. In contrast to the TUC-Bots with its micro-controller-based programming, the sensors and embedded PC on this car-like robot allow the development of more sophisticated algorithms within the field of autonomous mobile robotics.
2017
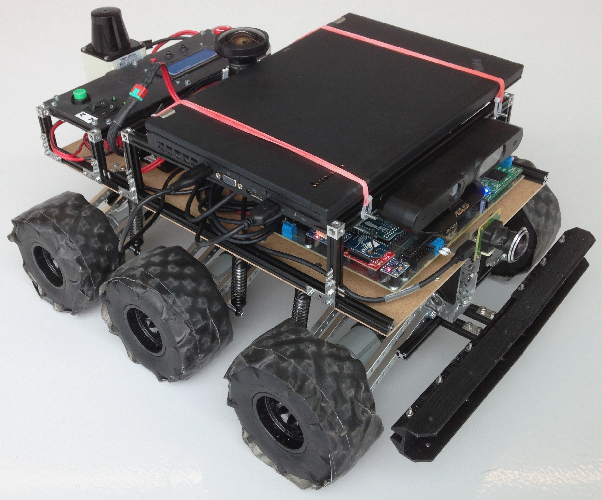
In addition to our two bigger robots, we wanted to use a small and very agile robot for fast exploration in rough terrain. We built this "scout" robot based on the 6WD Mantis platform from Servocity. We are currently still testing various sensors (e.g. Intel RealSense) and finetuning the mechanical construction.
2015
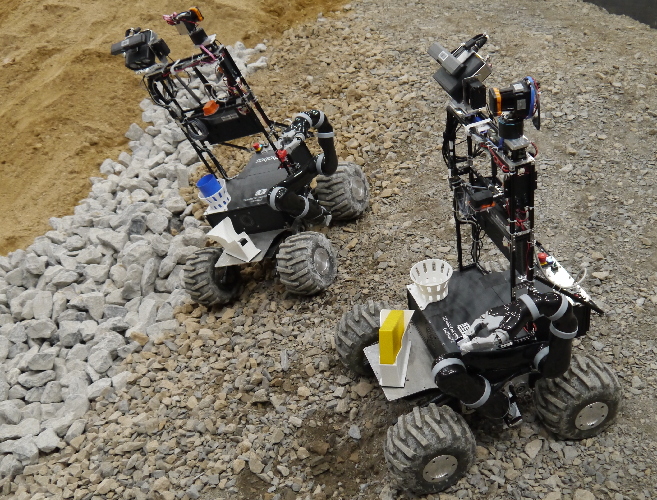
The second SpaceBot Cup took place in 2015 and we completely rebuilt our two robots with new sensors (MultiSense S7 stereo camera from Carnegie Robotics, rotating Hokuyo laser for 3D scanning) and new Mico robot arms from Kinova. Further details can be found in our project page and this paper.
2013
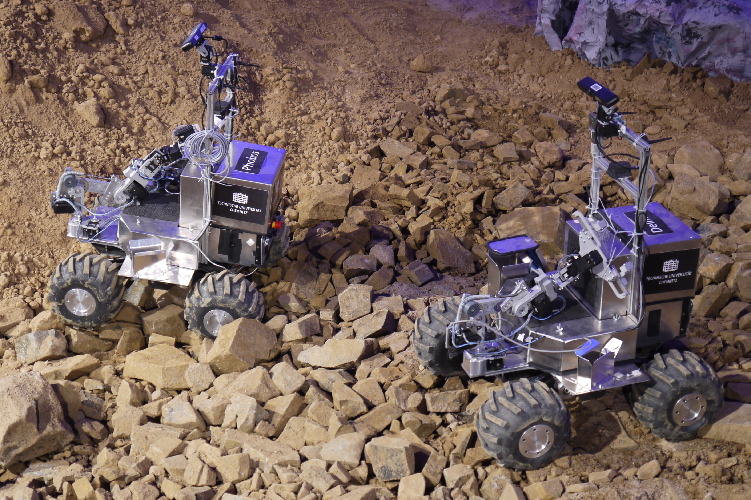
This year, the first SpaceBot Cup organized by the German Aerospace Agency DLR took place. It was a perfect task for us to integrate and test our research ideas in a challenging real-world scenario. We used a team of two identical robots based on the Summit XL platform from Robotnik with our own arm construction for mobile manipulation. Details about the SpaceBot Cup 2013 and our robots can be found in this paper.
2012
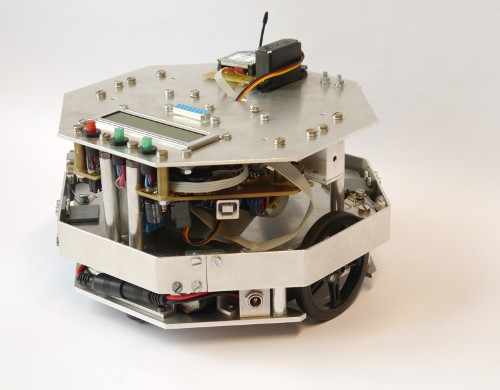
Six years after the second generation of our maze robots, we developed and built a fleet of "TUC-Bots" for our popular lab course. This robot has a modular structure with two ATmega644P microprocessors and various sensors for odometry and obstacle avoidance. Details about the robots and the tasks to be performed in the lab course can be found in this paper.
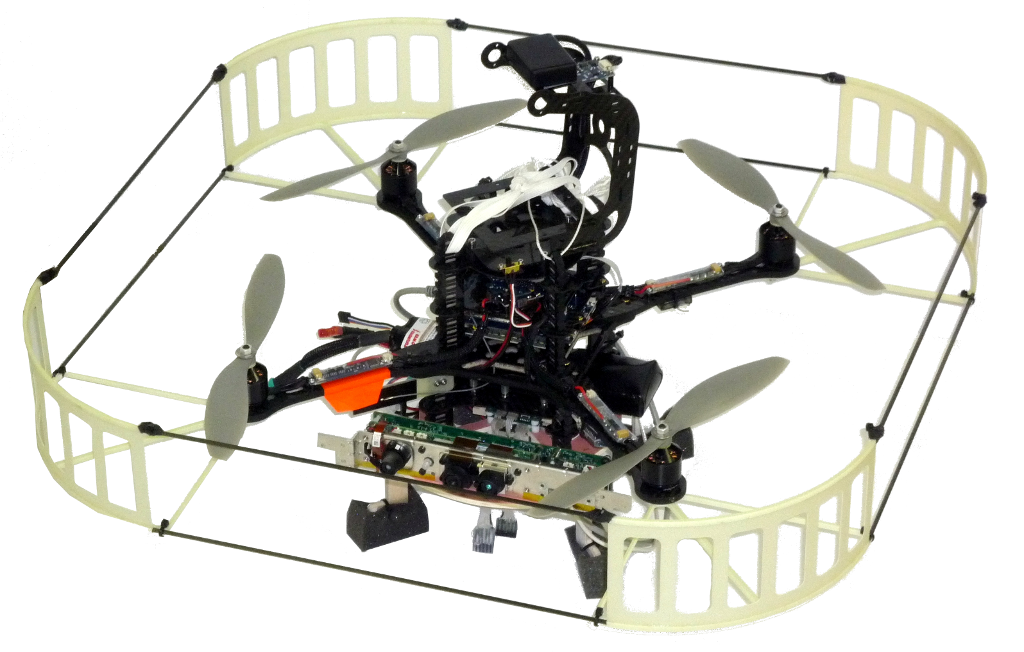
2010
The Pelican quadcopter is the Hummingbirds big brother. While using the same flight control, it provides 500g payload. Additionally, it is already equipped with a 1.6GHz Intel Atom PC. The high maximum payload enables the system to carry even heavier sensors like RGB-D sensors (e.g., Kinect) or 2D laserscanners.

2009
The second generation of our autonomous airship project resulted in a blimp with a length of 11 meters and a diameter of 3 meters. It could fly for one hour with a 5kg payload. The application was sensor coverage in emergency situations like large floods or fires.
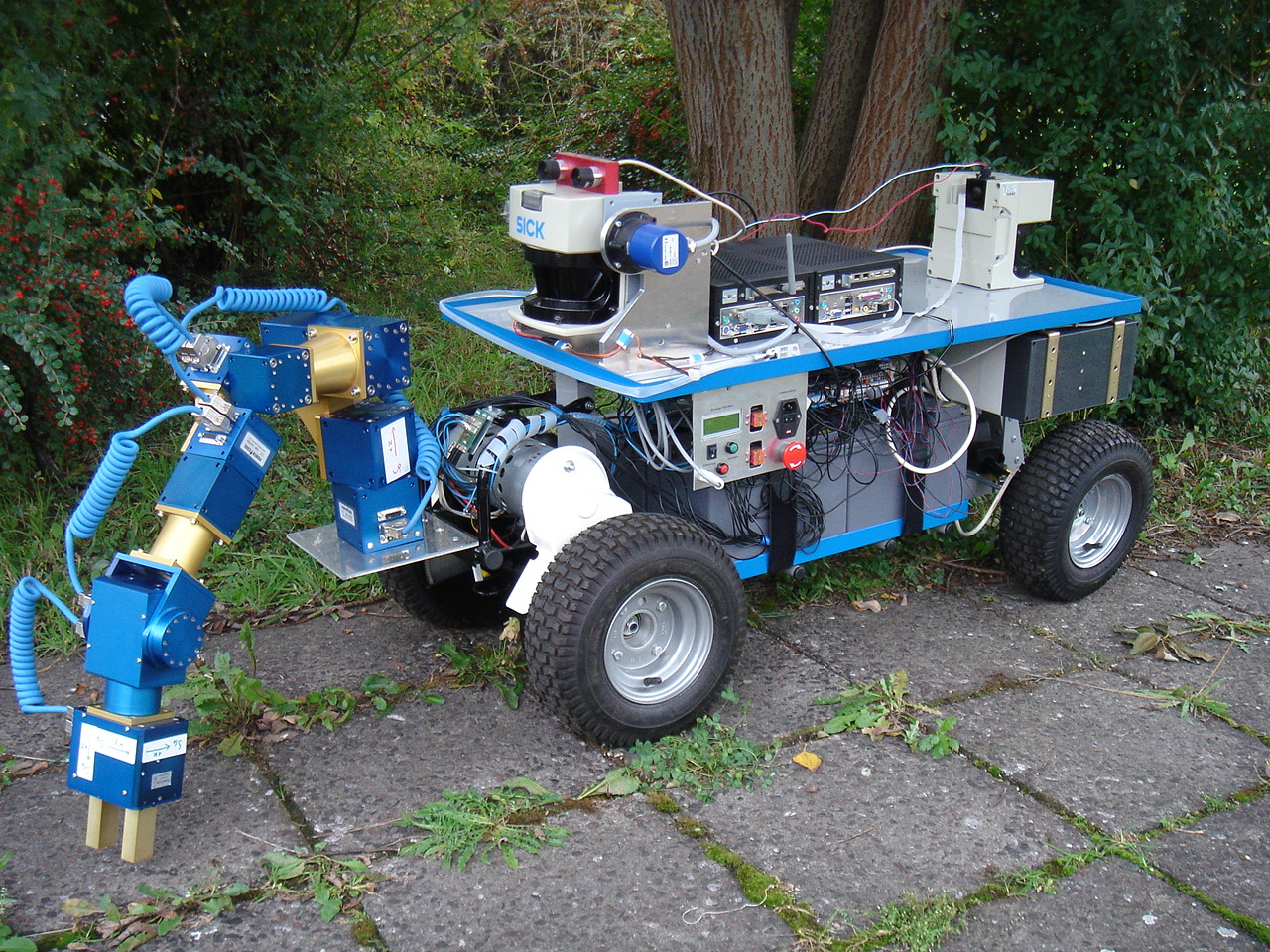
2008
With a maximum payload of 150kg and a size similar to a golf car, the RobuCar TT from RoboSoft is our biggest mobile robot. This robot is particularly suited for outdoor environments where it can outperform other robots through its cross-country capability and its high payload.


2007
The very beginning of the drone age! We bought three Hummingbird quadcopters from Ascending Technologies. These drones were already very powerful with a speed of up to 50 km/h. A problem compared to the blimp is the payload of only 200g and the flight time of 15 minutes.
2006
After 5 years of operation we retired the first generation of our maze robots and installed the second generation for our lab course. The robots were a custom-made product according to our specification.


2006
The first generation blimp of our autonomous airship project. This was the the time before quadcopter were available.
2005
Our second robot ("Franz") was built in-house as a research platform for mobile manipulation. It has an Ackerman steering and is equipped with an arm from Amtec with seven PowerCube modules.
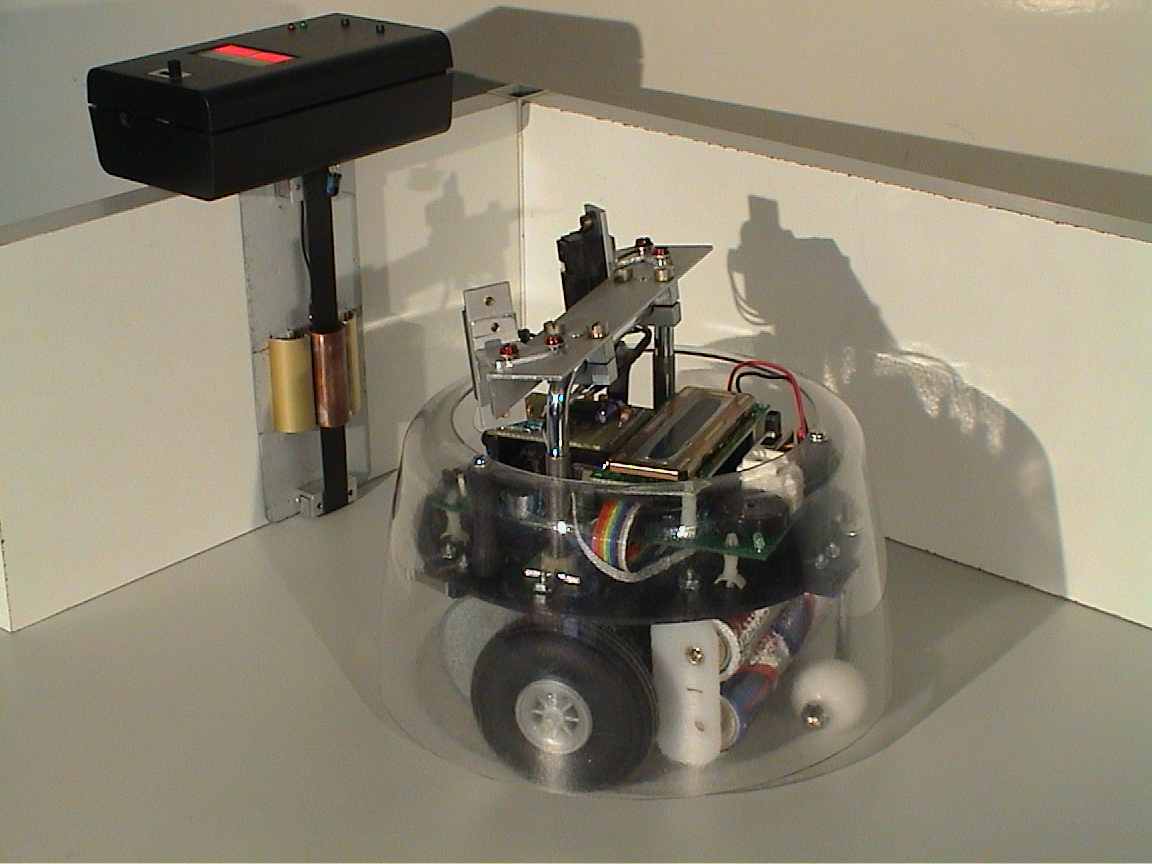
2001
The first generation of small robots for our mobile robotics lab arrived. The robots have to navigate through an unknown maze, find light beacons and switch them on. The lab course is still very popular to this day.
2000
Our first robot (Nickname "Hans") is a Pioneer 2 AT from ActivMedia Robotics. With its differential drive it is well suited for indoor and outdoor environments. We used it with a SICK Laserscanner and a camera on a pan-tilt unit. It is still operational and used by students in lab courses.
