Welcome to the chair of Automation Technology
Our goal is to increase the autonomy of mobile systems such as ground or aerial robots and self-driving cars. These systems must be able to sense their surroundings, extract and interpret relevant information, and make decisions about their next actions. Despite some progress in recent years, both parts - perception and action selection- require novel approaches in order to make a step change towards full autonomy. This will have to include continuous learning and prediction of time varying sensor-input sequences and their corresponding actions.
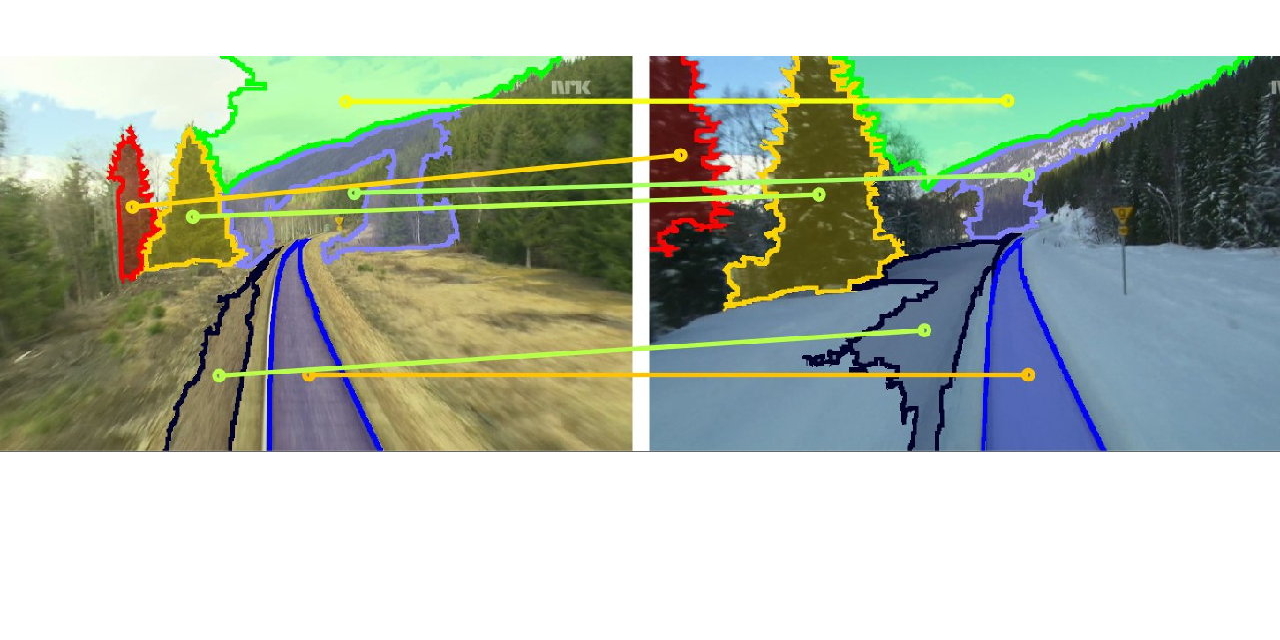
We have been working on various parts of this puzzle, e.g. on place recognition for long-term autonomy, robust SLAM with switching constraints, or sensor fusion with factor graphs. More recently, we have worked on different machine learning approaches that might be applicable and useful for real world robotics application. But you only see the full extent of the problem when you integrate everything into real robots and operate them in unstructured environments. The SpaceBot Cup organized by the German Aerospace Agency DLR was an excellent platform for us to test our systems “in the wild”. This timeline of our robotic hardware also gives you an impression of our past activities.
Current research focus
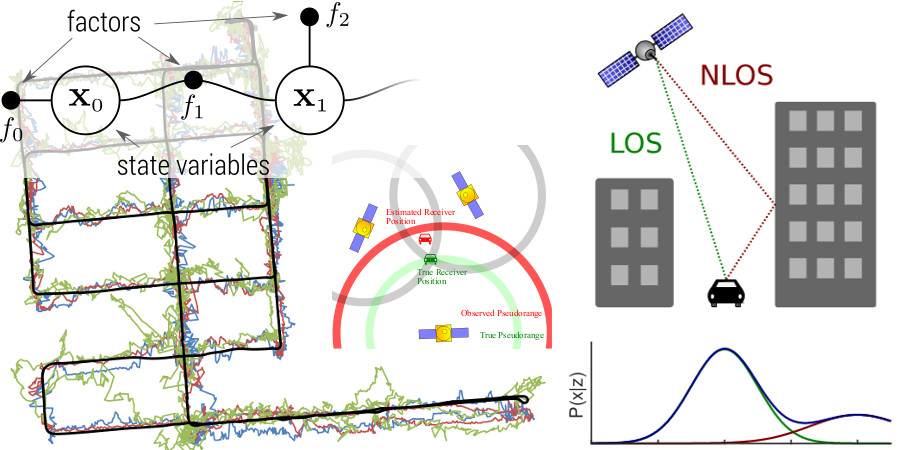
Factor Graph based Multipath Mitigation
Follow our research on robust factor graph based sensor data fusion.
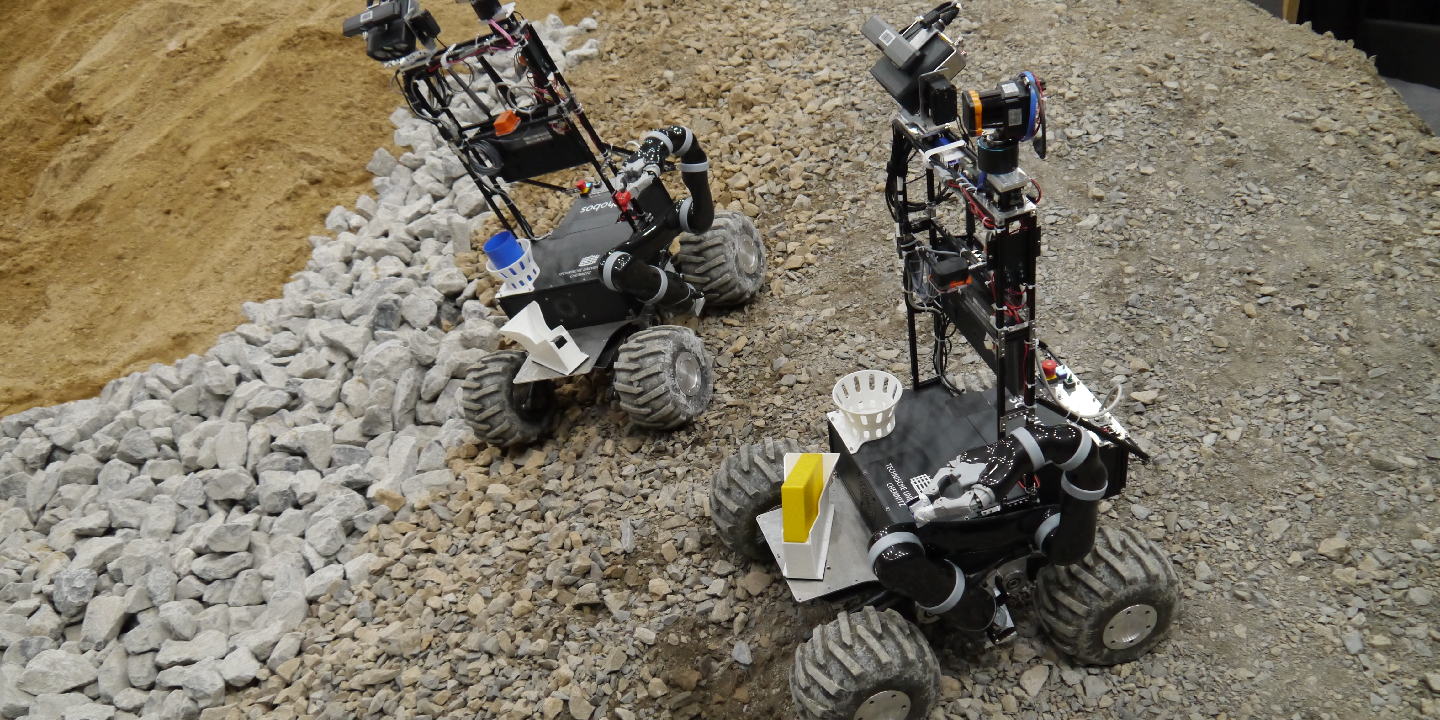
Field Robotics and SpaceBot Cup
Follow our project page for more information.