Visual Landmarks for Place Recognition in Changing Environments
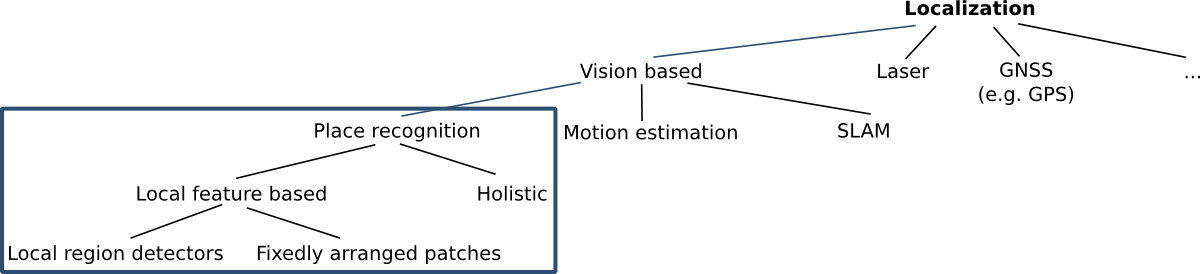 Place recognition based on local image features is an approach to localization.
Place recognition based on local image features is an approach to localization.
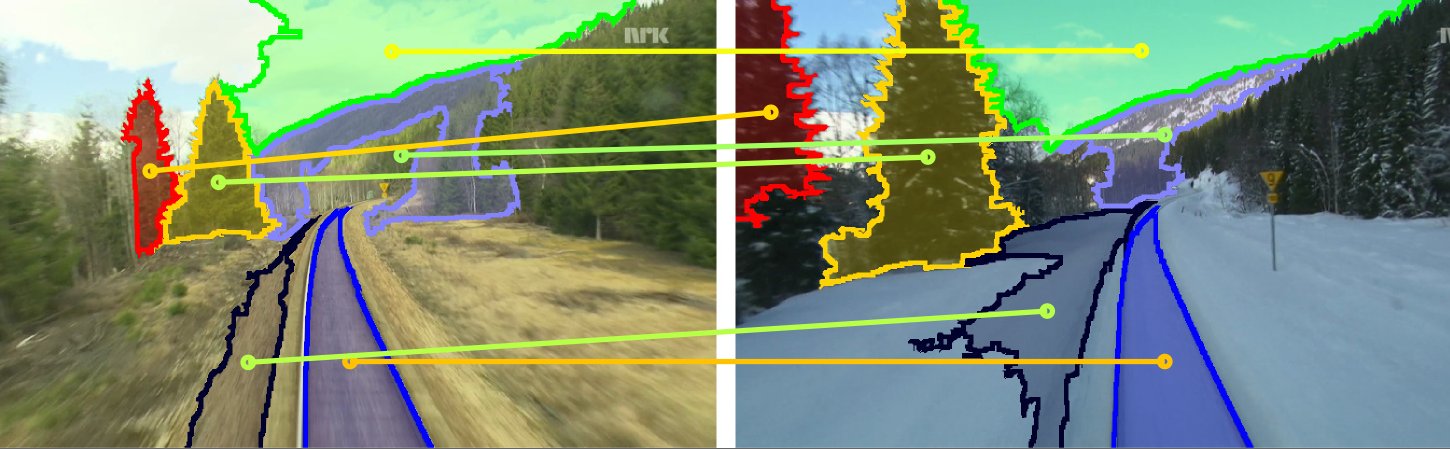 Example segmentation based landmarks.
Example segmentation based landmarks.
Related Publications
Neubert, P., Protzel, P. (2016). Beyond Holistic Descriptors, Keypoints and Fixed Patches: Multiscale Superpixel Grids for Place Recognition in Changing Environments. IEEE Robotics and Automation Letters and presentation at IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden. Code
Krajník, T., Cristóforis, P., Kusumam, K., Neubert, P. and Duckett, T. (2016). Image features for visual teach-and-repeat navigation in changing environments. Robotics and Autonomous Systems (2016),DOI: http://dx.doi.org/10.1016/j.robot.2016.11.011
Neubert, P. (2015). Superpixels and their Application for Visual Place Recognition in Changing Environments. Dissertation, TU Chemnitz.
Neubert,P., Protzel, P. (2015). Local Region Detector + CNN based Landmarks for Practical Place Recognition in Changing Environments. Proc of. European Conference on Mobile Robotics (ECMR), Lincoln, England. Code