Dr.-Ing. Stefan Schubert
Research Interests
My research interests are within the field of mobile robotics and artificial intelligence. I am working on environment perception, navigation, and machine learning for decision making and object detection.
More information can be found here:
- Visual Place Recognition in Changing Environments
- Circular Convolutional Neural Networks (CCNNs)
- Vector Symbolic Architectures
- Camera-based Navigation in a 3D Map
- How to Build and Customize a High-Resolution 3D Laserscanner Using Off-the-shelf Components
- Field Robotics and the SpaceBot Cup
Awards

Outstanding Workshop Paper Award at RSS 2025 Workshop on Unifying Visual SLAM
I am thrilled that my paper on the potential of Visual Place Recognition for Visual SLAM received the Outstanding Workshop Paper Award at the Unifying Visual SLAM workshop at RSS 2025 (Robotics: Science and Systems).
Many thanks to the organizers for this great workshop: Alejandro Fontan Villacampa, Lukas Schmid, Olga Vysotska, Mubariz Zaffar, Linfei Pan, Gokul B. Nair, Johan Barthelemy, Javier Civera and Michael Milford.
 Attendees. Stefan Schubert")
RSS Pioneer 2019 (Robotics: Science and Systems)
I was one of the 23 international PhD students and postdocs who have been accepted to this year's RSS Pioneers Workshop (RSSP'19). Thanks to the RSSP'19 general chairs Tesca Fitzgerald (Georgia Institute of Technology, USA) and Abhinav Valada (University of Freiburg, Germany) as well as all other organizers.

TAROS 2017 Best Paper Award
We presented the best paper during the Conference Towards Autonomous Robotic Systems (TAROS) held at the University of Surrey, UK. Special thanks to the conference chair Prof. Yang Gao and all other organizers.

TAROS 2016 Best Paper Award
We presented the best paper during the Conference Towards Autonomous Robotic Systems (TAROS) held at the University of Sheffield, UK. Special thanks to the conference chairs Prof. Tony Prescott and Prof. Jacques Penders and all other organizers.

Prize of the Dresden Circle of Business and Science, 2015
Award winner as junior scientist in the field of natural sciences, Dresden, Germany.

German National Scholarship, 2011-2013
Successful application for the German National Scholarship (merit-based scholarship).
Tutorials
An Introduction to Vector Symbolic Architectures and Hyperdimensional Computing, ECAI 2020
We held a tutorial (tutorial website) on high dimensional computing at the 2020 European Conference on Artificial Intelligence (ECAI). We gave an introduction to properties of the high dimensional space, Vector Symbolic Architectures (VSAs), high-dimensional encoding of real world data, and applications. More information about the topic can be found in our recent journal article:

High dimensional computing - the upside of the curse of dimensionality, KI 2019
We held a tutorial (tutorial website) on high dimensional computing at the 2019 German conference on artificial intelligence (KI) in Kassel, Germany. We gave an introduction to properties of the high dimensional space, Vector Symbolic Architectures (VSAs), high-dimensional encoding of real world data, and applications. More information about the topic can be found in our recent journal article:
Publications


: Graph-based Non-Linear Least Squares Optimization for Visual Place Recognition in Changing Environments. IEEE Robotics and Automation Letters (RA-L)")
: Unsupervised Learning Methods for Visual Place Recognition in Discretely and Continuously Changing Environments. Proc. of Intl. Conf. on Robotics and Automation (ICRA)")

: An Introduction to Hyperdimensional Computing for Robotics.")
: Towards combining a neocortex model with entorhinal grid cells for mobile robot localization. Proc. of European Conference on Mobile Robotics (ECMR)")
: A neurologically inspired sequence processing model for mobile robot place recognition. IEEE Robotics and Automation Letters (RA-L) and presentation at Intl. Conf. on Intelligent Robots and Systems (IROS)")
: Circular Convolutional Neural Networks for Panoramic Images and Laser Data. Proc. of Intelligent Vehicles Symposium (IV)")
: Sampling-based Methods for Visual Navigation in 3D Maps by Synthesizing Depth Images. Proc. of Intl. Conf. on Intelligent Robots and Systems (IROS)")
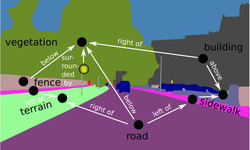
: Synthesized semantic views for mobile robot localization. Proc. of European Conf. on Mobile Robotics (ECMR)")
: Towards camera based navigation in 3D maps by synthesizing depth images. Proc. of Towards Autonomous Robotic Systems (TAROS)")
: Learning Vector Symbolic Architectures for Reactive Robot Behaviours. Proc. of Intl. Conf. on Intelligent Robots and Systems (IROS) Workshop on Machine Learning Methods for High-Level Cognitive Capabilities in Robotics")
: Map Enhancement with Track-Loss Data in Visual SLAM. Proc. of Intl. Conf. on Intelligent Robots and Systems (IROS) Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots")
: Two Autonomous Robots for the DLR SpaceBot Cup — Lessons Learned from 60 Minutes on the Moon. Proc. of Intl. Symposium on Robotics (ISR)")
: How to Build and Customize a High-Resolution 3D Laserscanner Using Off-the-shelf Components. Proc. of Towards Autonomous Robotic Systems (TAROS)")
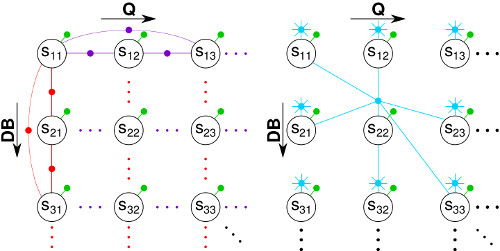
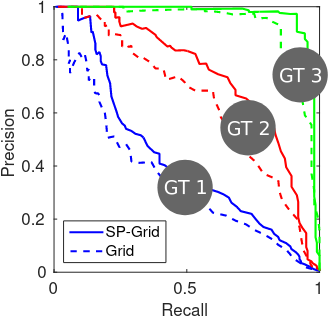
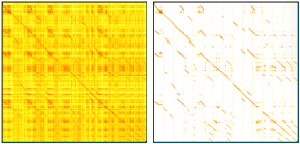
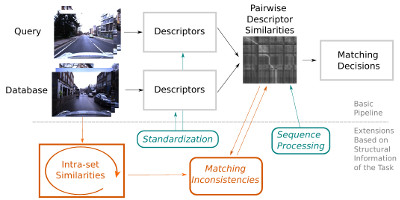
: Exploiting intra Database Similarities for Selection of Place Recognition Candidates in Changing Environments. Proc. of. Computer Vision and Pattern Recognition (CVPR) Workshop on Visual Place Recognition in Changing Environments")