Dr.-Ing. Sven Lange

-
Phone:+49 371 531-37197
-
Email:
-
Address:Straße der Nationen 62, 09111 Chemnitz
-
Room:
About Me
In the future, I will continue my work in research and education as a post-doc at the Chair of Neurorobotics. The following page describes my work at the Chair of Automation Technology.
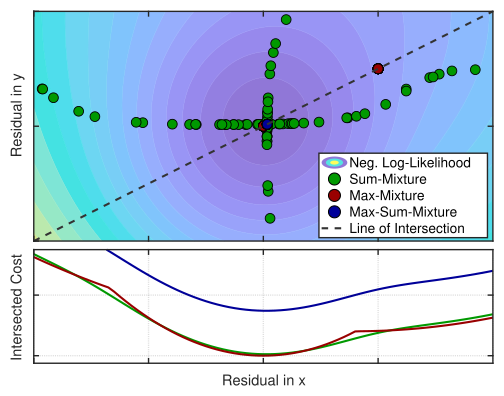
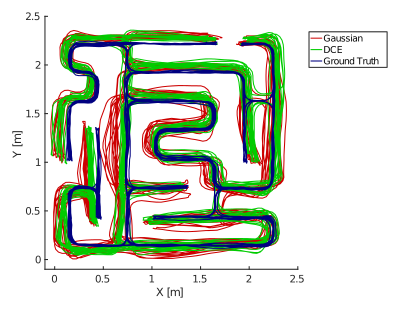
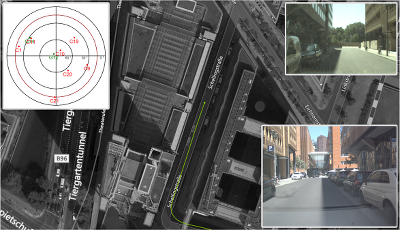
At the Chair of Automation Technology, I worked as a post-doctoral researcher including responsibilities in education and project management. My research interests are factor-graph based optimization methods in the context of SLAM and mobile robotics in general. Especially, the versatility of these approaches within the context of mobile robotics is appealing to me. In combination with robust implementations, incremental solvers, or multi-modal error models, sensor fusion tasks are solvable as well as e.g. planning tasks.
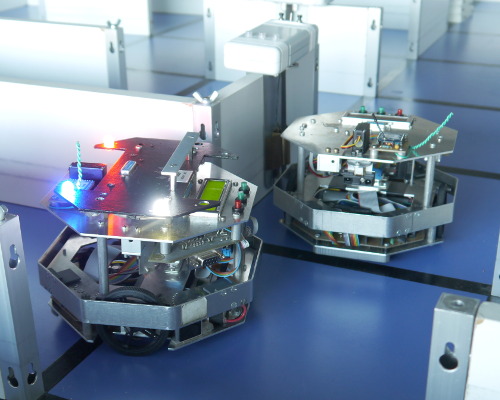
Further interests are autonomous MAVs, educational robots and mobile robotic system integration (field robotics) in general.
See Also
Publications
For further information, have a look into my publications below.