Research Focus Mechatronic Systems
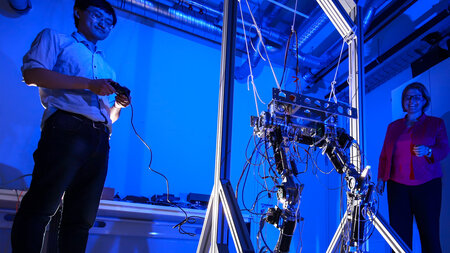
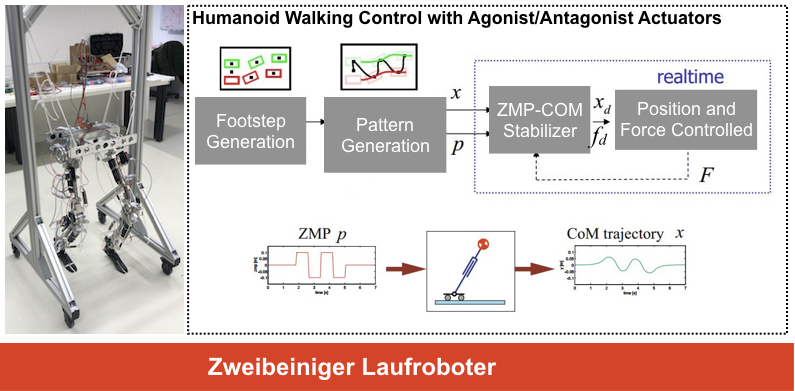
Humanoid two-legged Walking Robot
With the development of the walking robot, the professorship is proud to present a first two-legged robot. Its specialities are the flexible components made from suspension elements. The foot is a carbon prosthetics; its feet are light-weight and flexible. The humanoid walking robot has two springs in each joint (antagonist and antagonist) operated by a system of wire rope hoist for its kinematics. Due to the usage of springs, the walking robot is able to store energy, which then can be used for jumping and running tasks. Algorithms for balancing, jumping, running and walking are in the process of being developed at the professorial chair.
Robotic Hands (gripper)
When developing robotic hands (gripper), the relation between assembly space and strength ratio are essential whilst ensuring a light-weight model. A new, prototype 3 finger hand with a functional thumb has been developed - multiple patterns of grips are possible. Tactile sensors are integrated into the system and used by admittance control.
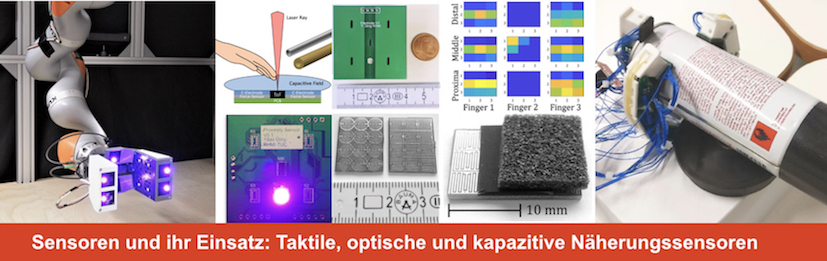
Sensors for Sensor Skins
In the future, robots shall be equipped with a soft sensor skin. The professorial chair is developing different sensors and integrates these in applications of gripping processes or for safer human-machine interactions. With the help of resistivity sensors, the pressure distribution of contact forces during the gripping process is used in order to estimate the position of known objects. Distance sensors add to the safety and with the implementation of capacitive sensors, so that materials of the immediate surroundings can be detected.