News
2025
Invited Talk at the European Robotics Forum 2025
Stephan Schwarz was invited to give a talk at this year´s European Robotics Forum in Stuttgart. Within the workshop “TeleRobotics 360: Exploring Innovations from Healthcare to Industry“ he presented his recent research with the title “Safety and Usability in Telemanipulated Human-Robot Interactions” and participated in a panel discussion regarding the development and challenges of telemanipulation.

Many papers accepted at the 1st German Robotics Conference
We are happy to announce that all of our papers have been accepted at the 1st German Robotics Conference, which will take place in Nuremberg in March 2025, organized by the RIG. Congratulation to all of the authors from TU Chemnitz, who got their papers accepted. There are more than 10 contributions from our University. This shows the continuous improvement of robotics research at TUC. The fact that the papers are non pre-review does not diminish the success. We are proud on all the young researchers!
We will present our project aiRobot on the this year "Hannover Industrie Messe"
The project aiRobot has been selected by the Federal Ministry of Education and Research to be presented on the Hannover Indusrie Messe on the BMBF's booth in March 2025. We will be exited to seeing you there!
The German Robotics Institute has been established and we are associated member
Since July 2024 RIG was found. Prof. Ulrike Thomas is associate member and coordinator/speaker of the TUC-team for RIG.
Prof. Ulrike Thomas invited Speaker at the IEEE/SICE Symposium on System Integrations in Munich
On 01/21/2025, Professor Thomas gave an invited talk about Assembly Sequence Planning: "The Transformation from Planning to Learning Robotics Systems in Assembly". She was invited Speaker and took part in the Panel Discussion on the Workshop for Reconfigurable Manipulation Robots.

2024
Carl Gäbert presented this paper on the Humanoids Conference in France
On the IEEE International Conference on Humanoid Robotics, Carl Gäbert presented his work: Generating Dual-Arm Inverse Kinematics Solutions using Latent Variable Models. Congratulations to him.
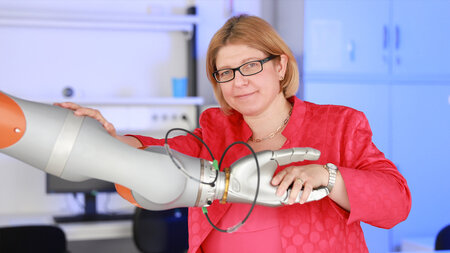
Prof. Ulrike Thomas gave a presentation on telemanipulation for medical applications in Leipzig
Prof. Ulrike Thomas introduced our new telemanipulation system available for various medical applications.
Stephan Schwarz presented his paper on the this years IROS conference in Dubai.
On the IEEE International Conference on Robotics and Intelligent Systems, Stephen Schwarz presented his work: 6D Variable Virtual Fixtures for Telemanipulated Insertion Tasks. Congratulations to him.
Chaitanya Bandi won the Best Student Paper Award at the DeLTA Conference in France
On the 5th International Conference on Deep Learning Theory and Application in Dijon, France, Chaitanya Bandi won the Best Student Paper Award! Papertitle: " Action Conditioned Attention Encoder-Decoder Discriminator for Human Motion Generation" authored by Chaitanya Bandi and Ulrike Thomas. Chaitanya, we are proud on you, congratulations!

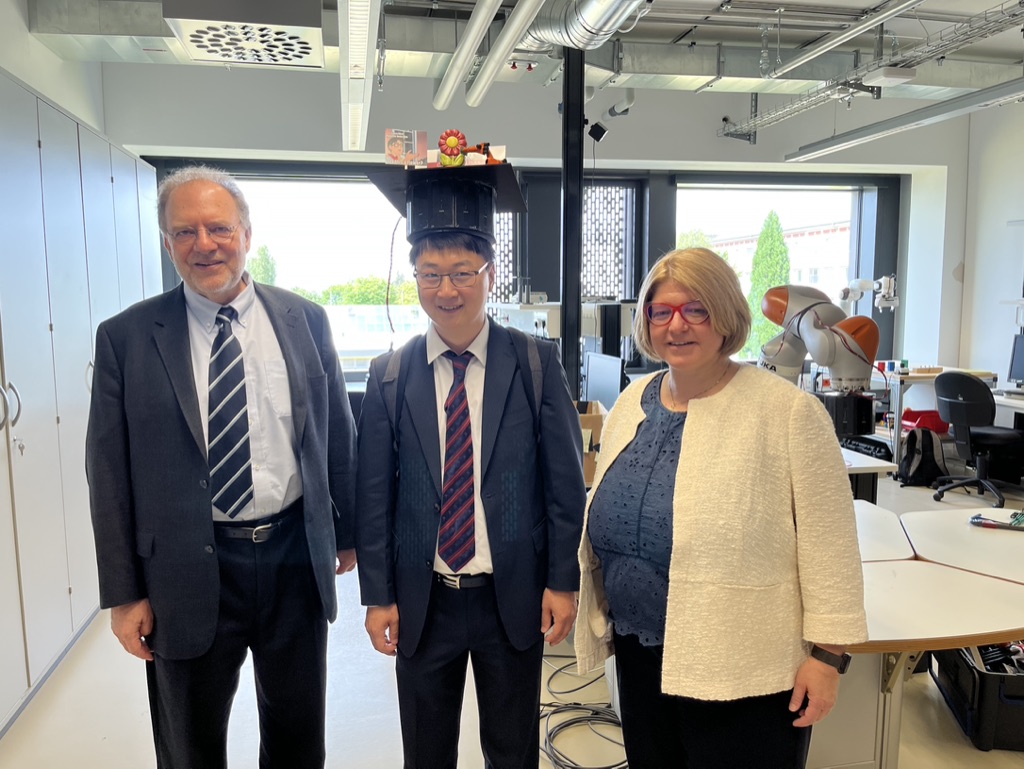
Visit by Bruno Siciliano
Bruno Siciliano visited our Lab on 06/21/2024 and tested our systems. We enjoyed his stay and agreed to start collaborations!
 From left to right: Ulrike Thomas, Guiseppe Sanseverino, Stephan Schwarz, Bruno Siciliano, Chaitanya Bandi and Hongxi Zhu.
From left to right: Ulrike Thomas, Guiseppe Sanseverino, Stephan Schwarz, Bruno Siciliano, Chaitanya Bandi and Hongxi Zhu.
We received a new European Patent on Elastic Robot Joints
Hongxi Zhu and Ulrike Thomas own three patents for new elastic robot joints. Two patents are granted by the "German Patent Amt" and one is granted by the European Patent Office.
We are suggested for a Best Paper Award on VisApp 2024 in Rome
The paper titled "Hand Mesh and Object Pose Resonstruction using Cross Model Autoencoders" has been suggested for the best paper award in the International Conference on Computer Vision, Theory and Applications (VISAPP), Rome, Italy, 2024.
Paper Accepted on the IFSA Winter Conference on Automation, Robotics and Communication for Industry 4.0/5.0 (ARCI 2024) in Insbruck, Austria
The paper "Virtual Guided Telemanipulation using Neural RRT-Based Planning", has been presented in Insbruck, Austria. Congratulation to the authors: Stephan Schwarz, Carl Gäbert, Bendikt Nieberle and Ulrike Thomas!
Paper accepted at ICRA 2024 in Yokohama, Japan
The paper "A Novel Compact Design of a Lever-Cam based Variable Stiffness Actuator: The LC-VSA joint" has been accepted at ICRA 2024. Congratulation to the authors: Hongxi Zhu and Ulrike Thomas!
2023
The new project aiRobot has been started October 2023
Together with a German Software and Robotics Company we started the project aiRobot "Intelligent Robots for SMEs" in October 2023. In this project, it is the aim to develop a digital twin for robot work cells and to develop new learning algorithms for one and two handle manipulation tasks that can be used in production processes.
Three papers are accepted at ICRA 2023 in London
We presented three papers at ICRA 2023 in London. Congratulation to Chaitanya Bandi, Carl Gäbert and Stephan Schwarz!


2022
We are at IROS 2022 in Kyoto
Stephan Schwarz gives a presentation about "Variable Impedance Control for Safety and Usability in Telemanipulation" at the this years IROS conference in Kyoto, Japan. Dr. Yitao Ding owns also two contributions, one paper and one workshop in Kyoto!
Prof. Thomas gives an invited talk
Prof. Thomas talks at the DFG funded research training group, Intraoperative Multisensoric Tissue Differentiation in Oncology in Stuttgart. The title of the talk is "From Manipulation Skills to Medical Applications - a personal view about the differences and similarities". The talk is about recent and past developed telemanipulation-systems for medical applications and how can achievements from assembly automation be used in such systems.
Promotion Yitao Ding am 15.Juli 2022
Wir gratulieren Dr.-Ing. Yitao Ding zur erfolgreichen Verteidigung seiner Dissertation.
 Am 15.7.2022 hat Yitao Ding seine Promotion erfolgreich vor einer International sehr gut besetzten Kommission verteidigt. Die Kommission bestanden aus Prof. Kasper Althöfer (Imperial College London), Prof. Björn Hein (KIT), Dr.-Ing. Arne-Jens Hempel (TUC), Prof. Dr.-Ing. Peter Protzel (Vorsitz - Bild links.) und der Betreuerin Prof. Ulrike Thomas (TUC - Bild rechts). Dr.-Ing. Yitao Ding (Bild Mitte) bei Übergabe des Hutes.
Am 15.7.2022 hat Yitao Ding seine Promotion erfolgreich vor einer International sehr gut besetzten Kommission verteidigt. Die Kommission bestanden aus Prof. Kasper Althöfer (Imperial College London), Prof. Björn Hein (KIT), Dr.-Ing. Arne-Jens Hempel (TUC), Prof. Dr.-Ing. Peter Protzel (Vorsitz - Bild links.) und der Betreuerin Prof. Ulrike Thomas (TUC - Bild rechts). Dr.-Ing. Yitao Ding (Bild Mitte) bei Übergabe des Hutes.
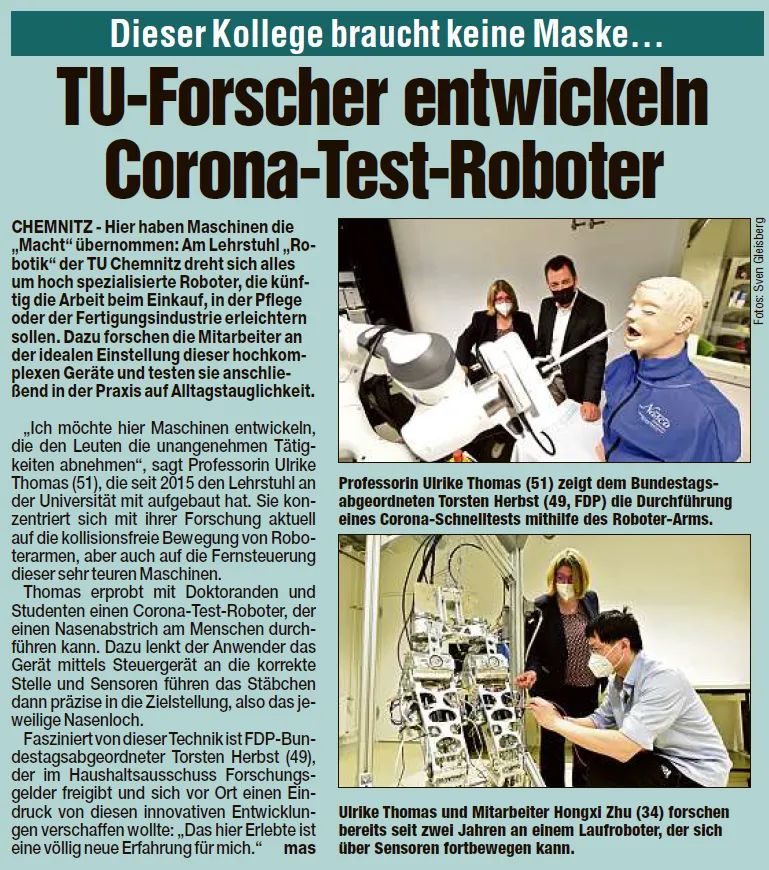
Torsten Herbst (MdB) zu Gast in der Robotik
2021
30.12.2021 we received a new patent!
We received a new patent by "Deutsches Patentamt" about a new mechanism for another non linear deformable robotic joint!
Prof. Thomas auf dem Dresdener-Robotik-Festival 16.9-17.9.2021
Gleich zweimal war die Robotik-Professorin Ulrike Thomas auf dem Dresdener Robotik Festival aktiv. Neben Oussama Khatib und Sami Haddadin gab sie eine Key-Note mit dem Titel Menschen in der Interaktion mit Robotern. Dabei stellte sie Interaktionsmethoden zwischen Mensch und Roboter dar, mit Anwendungen in der Fabrik der Zukunft, in Service-Robotik Szenarien z.B. in Supermärkten bis hin zu möglicher spontaner Interaktion auf der Straße, die sich durch koordinierte Bewegungen auszeichnen sollen. In Anschluss fand eine Podiumsdiskussion zum Thema Frauen in der Robotik statt.
Impressionen


Wir begrüßen Stephan Schwarz am Lehrstuhl
Am 01.06.2021 hat Stephan Schwarz seine Arbeit am Lehrstuhl aufgenommen. Er wird sich mit sicherer Mensch-Roboter-Interaktion und Telemanipulation beschäftigen. Wir wünschen ihm viel Spaß und Erfolg bei der Arbeit.
2020
Wir begrüßen Carl Gäbert am Lehrstuhl
Am 01.11.2020 hat Carl Gäbert seine Arbeit am Lehrstuhl aufgenommen. Er wird sich mit sicherer Mensch-Roboter-Interaktion, Motion Planning und Reinforcement Learning beschäftigen. Wir wünschen ihm viel Spaß und Erfolg bei der Arbeit.
Call for Papers for IROS 2020 Workshop
3rd Workshop at IROS 2020 on Proximity Perception in Robotics: Towards Multi-Modal Cognition Call for Papers: CfP For more information please visit here
Patent erteilt
Mit einem neuen elastischen Robotergelenk hoffen wir zukünftige Roboter nachhaltig zu verbessern. Das neue elastische Robotergelenk zeichnet sich durch einen nicht linearen Mechanismus zur regelbaren ebenfalls nicht linearen Einstellung der Nachgiebigkeit aus. Das Patent wird vom deutschen Patentamt unter der Nummer 10 2018 008 378 geführt.
e-Learning during Corona-Crisis
The complete teaching programming is turned into on-line courses, with Videos and Tutorials. For more information about our new E-Learning Courses please check our Website Teaching.
Wir begrüßen Frank Peters am Lehrstuhl
Am 01.04.2020 hat Frank Peters seine Arbeit am Lehrstuhl aufgenommen. Er wird sich mit sicherer Mensch-Roboter-Interaktion und Multi-Arm Koordination beschäftigen. Wir wünschen ihm viel Spaß und Erfolg bei der Arbeit.
2019
Neuer Sonderforschungsbereich von der DFG bewilligt
Wir freuen uns, dass die DFG in Ihrer Ausschusssitzung am 22. November 2019 einen SFB an der TU Chemnitz bewilligt hat. Professorin Thomas ist als stellvertretende Sprecherin maßgeblich daran beteiligt und froh über die Entscheidung der DFG sowie der Gutachterinnen und Gutachter und bedankt sich bei allen Beteiligten: "Es ist ein schöner Erfolg, wir sind stolz darauf und freuen uns auf die kommenden zunächst vier Jahre interdisziplinärer Forschung." Sonderforschungsbereiche sind strukturbildende Maßnahmen der Deutschen Forschungsgemeinschaft und können bis zu 12 Jahre gefördert werden.
Weitere Informationen zu den Teilprojekten finden Sie
hier
For the year 2020 we chair the DATE Robotics Track!
Professor Thomas chairs the robotics track for the DATE 2020 , one of the largest conference on design, automation and test in Europe! The conference will take place from 9th - 13th of March 2020 in Grenoble, France.
We are at IROS 2019 in Macau
Yitao Ding presents two contributions on IROS 2019: "With Proximity Servoing towards Safe Human-Robot-Interaction" and "3D Pose Estimation of Proximity Sensors with Self-Measurement for Calibration". The first contribution is a full paper the second a Workshop papers.
Wir begrüßen Kristof Kitz am Lehrstuhl
Anfang Oktober hat Kristof Kitz seine Arbeit als wissenschaftlicher Mitarbeiter aufgenommen. Er wird sich mit den Themen Reinforcement Learning, Grasping und Locomotion beschäftigen. Wir wünschen ihm viel Erfolg und Spaß bei der Arbeit.
Wir begrüßen Julian Bonse am Lehrstuhl
Zum Wintersemester hat Julian Bonse seine Arbeit als wissenschaftlicher Mitarbeiter aufgenommen. Er war bereits als HiWi mehrere Jahre am Lehrstuhl tätig und wird sich mit dem Aufbau und der Ansteuerung von Roboterhänden beschäftigen. Wir wünschen ihm weiterhin viel Erfolg und Spaß bei der Arbeit.
NEW: The Lund-Trondheim-Chemnitz Summer School
We are happy to announce the first Lund-Trondheim-Chemnitz Summer School on Robotics, which will take place from 5th to the 9th of August in Lund. The summer school is free for everyone. If you are interested please send us your CV. More information can be found here.
2nd Best Student Paper Award auf der RAAD 2019
Hannes Kisner stellte auf der 28ten International Conference on Robotics in Alpe-Adria-Danube Region (RAAD) seine Forschungen im Gebiet der Objektdetektion vor. Diese Arbeit wurde mit dem 2nd Best Student Paper Award ausgezeichnet. Mehr Informationen finden Sie hier
Wir gratulieren Christian Nißler recht herzlich zur bestandenen Dr. Prüfung
Am 3.Juni 2019 konnte Christian Nißler erfolgreich seine eingereichte Promotion zum Thema "Environment- and Self-Modeling through Camera-Based Pose Estimation" erfolgreich verteidigen. Wir gratulieren recht herzlich.
 Der Promovent in Mitten seiner Promotionskommission: Prof. Dr. Volker Krüger, Lund Universität, Schweden (l.), Dr. PD. Rudolph Triebel, TU München, Prof. Dr. Ulrike Thomas, TU Chemnitz, Christian Nißler, Prof. Dr. Olfa Kanoun, TU Chemnitz.
Der Promovent in Mitten seiner Promotionskommission: Prof. Dr. Volker Krüger, Lund Universität, Schweden (l.), Dr. PD. Rudolph Triebel, TU München, Prof. Dr. Ulrike Thomas, TU Chemnitz, Christian Nißler, Prof. Dr. Olfa Kanoun, TU Chemnitz.
Richard-Hartmann Dissertationspreis für Dr. Florian Müller
Am 7.Mai 2019 wurde der Richard-Hartmann Dissertationspreis vom Industrieverein Sachsen 1828 e.V. an Dr. Florian Müller verliehen. Der Preis wird jährlich für eine herausragende und zugleich praxisnahe Dissertation in Sachsen verliehen. Wir freuen uns mit dem Preisträger, dass der Preis dieses Jahr an ein Mitglied unseres Lehrstuhls gegangen ist und gratulieren recht herzlich.
 Uwe Gaul (l.), Staatssekretär im sächsischen Wissenschaftsministerium, und Prof. Dr. Reinhard Erfurth (r.), Ehrenpräsident des Industrievereins Sachsen 1828 e. V., übergaben Urkunde und Scheck an Dr. Florian Müller. Erste Gratulantin war die Betreuerin der Dissertation und Laudatorin Prof. Dr. Ulrike Thomas. Foto: Ines Escherich.
Weitere Informationen zur Preisverleihung.
Uwe Gaul (l.), Staatssekretär im sächsischen Wissenschaftsministerium, und Prof. Dr. Reinhard Erfurth (r.), Ehrenpräsident des Industrievereins Sachsen 1828 e. V., übergaben Urkunde und Scheck an Dr. Florian Müller. Erste Gratulantin war die Betreuerin der Dissertation und Laudatorin Prof. Dr. Ulrike Thomas. Foto: Ines Escherich.
Weitere Informationen zur Preisverleihung.
Neue Vorlesung Advanced Robotics / Deep Learning in Robotics
Zum Sommersemester startet eine neue Vorlesung Advanced Robotics - Deep Learning in Robotics. In dieser Vorlesung werden neue Lernalgorithmen aus dem Bereich Deep Learning und Reinforcement Learning für die Robotik vorgestellt. Die Vorlesung wird begleitet durch eine Praktikum und Übungen. Sie hat auch einen sehr guten praktischen Bezug. Erste Vorlesung findet am Freitag 5. April statt.
2018
Vorstellung einer Initiative zum Sonderforschungsbereich bei der DFG
 Am 26.11.2018 haben wir erfolgreich unser Konzept zum Sonderforschungsbereich "Hybrid Societies: Humans Interacting with Embodied Digital Technologies" bei der DFG in Bonn vorgestellt.
Am 26.11.2018 haben wir erfolgreich unser Konzept zum Sonderforschungsbereich "Hybrid Societies: Humans Interacting with Embodied Digital Technologies" bei der DFG in Bonn vorgestellt.
Professorin Ulrike Thomas wirkt bei Deutsch-Französischen Robotik-KI Strategie-Treffen mit.
In Paris haben sich am 5. September 50 renommierte Professoren der Robotik und KI getroffen. 25 aus jedem Land waren in die Nationale Akademie der Wissenschaften Leopoldina in Paris eingeladen.

Promotion Dr.-Ing. Florian Müller
Am 9.11.2018 hat Florian Müller erfolgreich seine Promotion zum Thema "Assistierende virtuelle Kraftfelder bei handgeführten Robotern" verteidigt. Wir gratulieren sehr herzlich zu diesem schönen Erfolg.
Der Promovend in Mitten der Promotionskommission: Von links Prof. Dr. Jens Jäkel, Prof. Dr. Ulrike Thomas, Florian Müller, Prof. Dr. Peter Protzel, Prof. Dr. Alexander Verl, Dr. Thomas Hulin.
22.10.2018 neues Patent „Elastisches Robotergelenk“ angemeldet
Wir haben am 22.10.2018 ein weiteres Patent mit dem Titel: „ elastisches Robotergelenk" angemeldet. Mit diesen neuen Robotergelenktyp wird es möglich, größere Kräfte bei erhörter Sicherheit aufzubringen. Durch die Nachgiebigkeit kann die Stoßenergie bei einem Kontak bereits mechanisch aufgenommen werden. Des Weiteren lässt sich die Steifigkeit des Gelenks nicht linear einstellen, so kann das Gelenk sehr nachgiebig, aber auch für Montageaufgaben sehr hart eingestellt werden.
Yitao Ding stellte "Proximity-Sensor-Skin" auf der IROS in Madrid vor
Die von ihm entwickelten Sensoren für eine neue Sensorhaut basierend auf kapazitiven Näherungssensoren und Time-of-Flight Abstandssensoren hat Yitao Ding erfolgreich auf der diesjährigen in Madrid stattfindenden IEEE/RSJ International Conference on Robotics and Intelligent Systems vorgestellt. Die Konferenz ist eine der weltweit renommiertesten Konferenzen auf dem Gebiet der Robotik. Er war gleich mit zwei Beiträgen vertreten.
Hannes Kisner stellte seine Veröffentlichung auf der Konferenz ISR/Robotik in München vor
Herr Kisner präsentierte auf der diesjährigen deutschen Robotikkonferenz seine Veröffentlichung zum Thema Objektlageschätzung einem breiten Fachpublikum in München.