Forschungsschwerpunkt Mechatronische Systeme
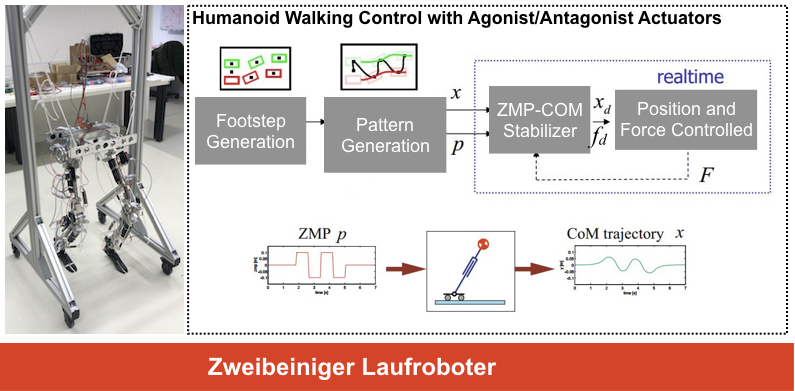
Humanoider Laufroboter
Mit dem Laufroboter TUC haben wir unseren ersten zweibeinigen Roboter entwickelt. Dieser verfügt über nachgiebige Komponenten, die aus Federelementen bestehen. Der Fuß ist eine Prothese, die aus Carbon besteht. Damit sind die Füße leicht und flexibel. Der Roboter hat jeweils zwei Federn pro Gelenk (Agonist und Antagonist) und wird über eine Seilzugkinematik betrieben. Durch die Federn kann er Energie speichern und somit auch springen und laufen. Algorithmen zum Balancieren, Springen und Laufen werden an unserem Lehrstuhl entwickelt.
Roboter Hände
Bei der Entwicklung von Roboterhänden kommt es darauf an ein gutes Bauraum zu Kraftverhältnis zu erreichen und gleichzeitig eine leichte Hand zu entwickeln. Prototypisch haben wir eine neue 3-Finger Hand mit zwei rotierbaren Fingern gebaut. Mit der Hand sind verschiedene Griffe möglich. Die Integration von Admittanz-Regelung erfolgt mittels taktilen Sensoren, die als Sensormatrizen in den Fingern integriert sind.
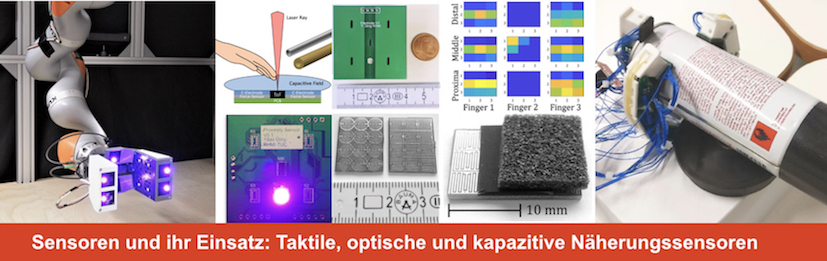
Sensoren für eine Sensorhaut
Roboter sollen zukünftig mit einer Sensorhaut ausgestattet werden. Dafür entwickeln wir verschiedene Sensoren und integrieren sie in Anwendungen zum Greifen oder für eine sicher Mensch-Roboter-Interaktion. Mit Hilfe von resistiven Sensoren lassen sich Druckverteilungen der Kontaktkräfte beim Greifen zum Schätzen der Lage bekannter Objekte in der Hand verwenden. Abstandssensoren erhöhen die Sicherheit und mit Hilfe kapazitiver Sensoren lassen sich Materialien der nahen Umgebung delektieren.