Research Areas at the Robotic's Lab
|
|
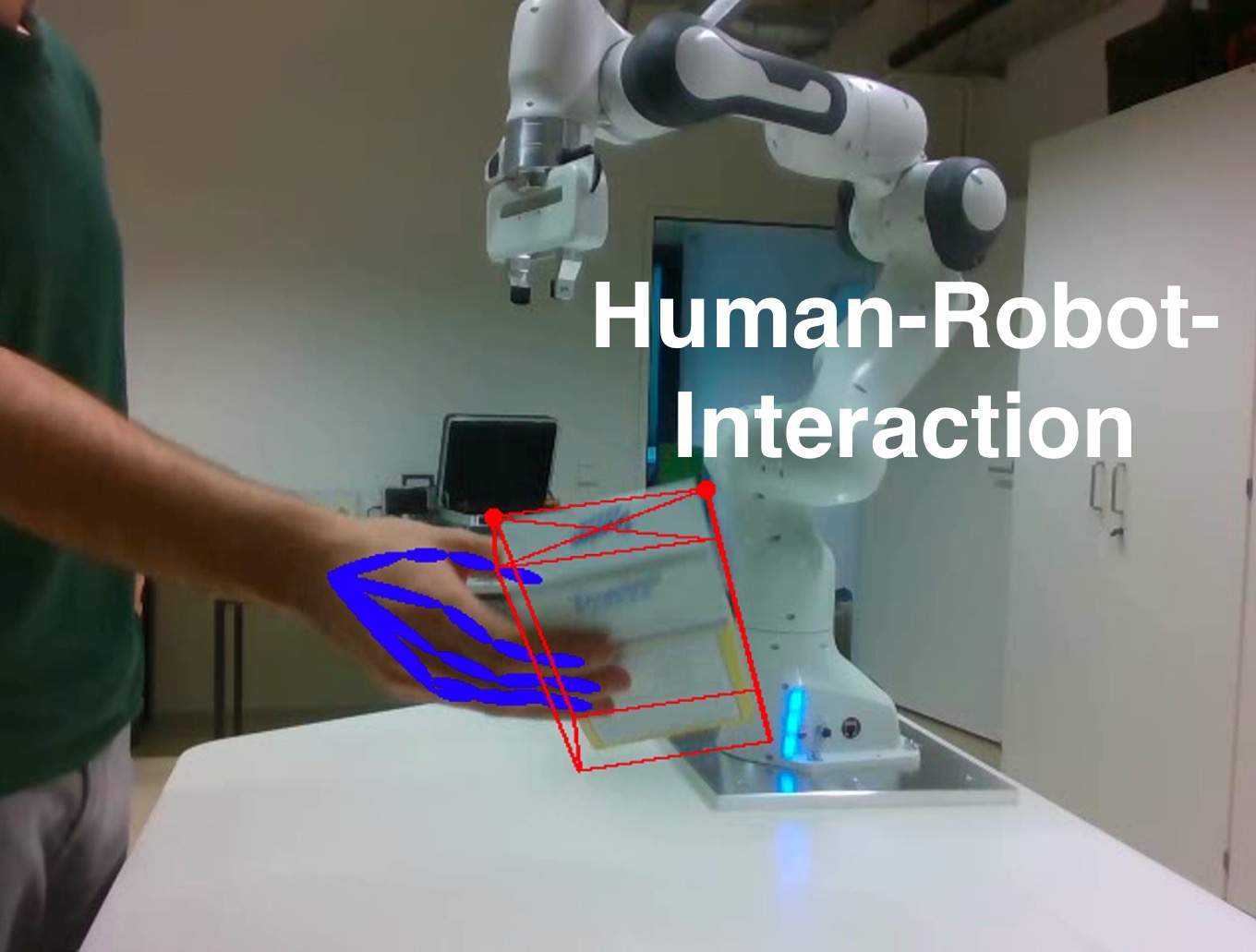
Human-Robot-Interaction
|
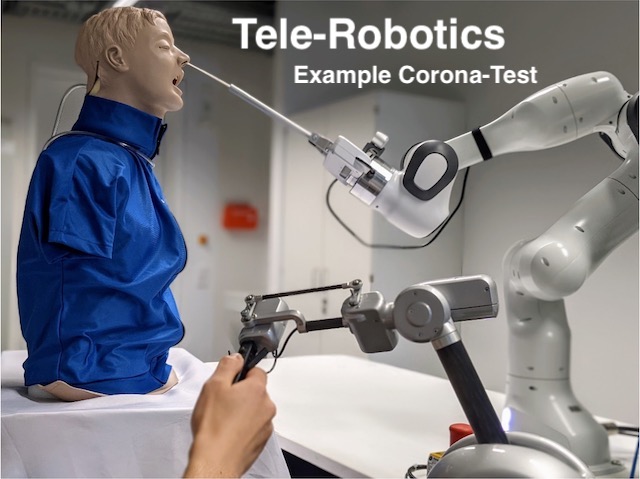
Telerobotics and Telemanipulation
|
 |
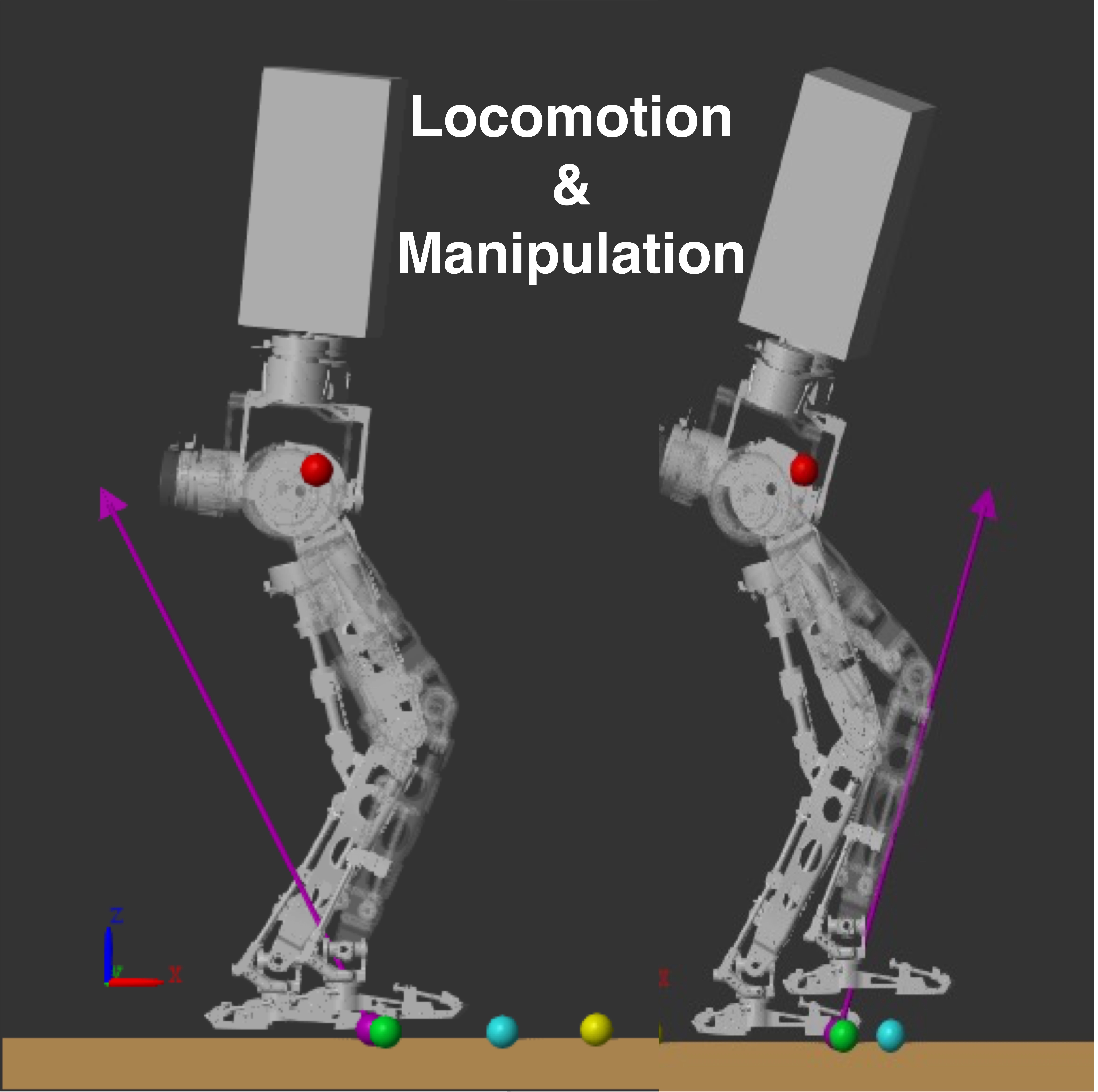 |
Locomotion and Manipulation
|
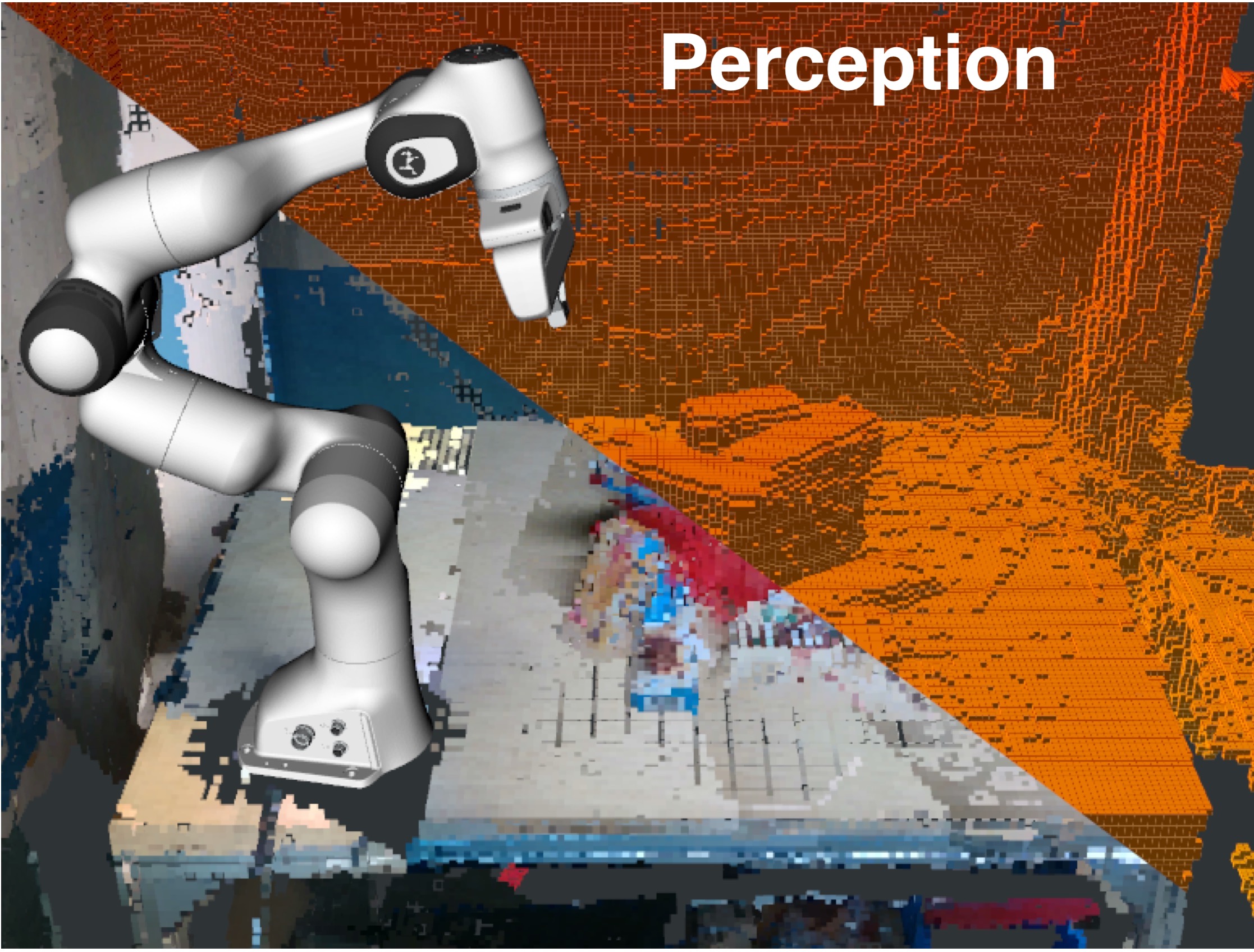
Perception
|
 |
Tools and Patents
|
|