Research Area Locomotion and Manipulation
|
|
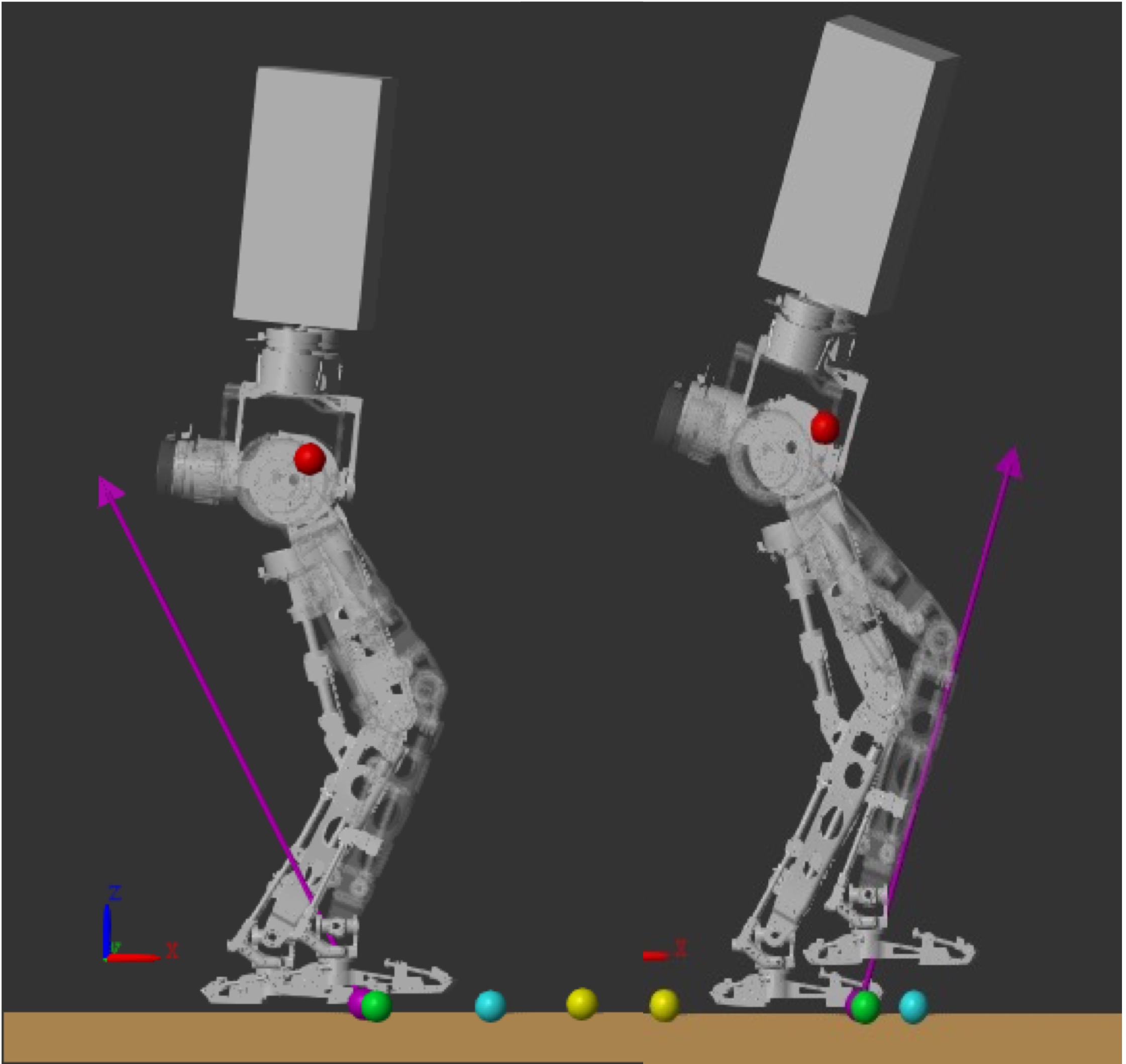
Locomotion and Walking
|
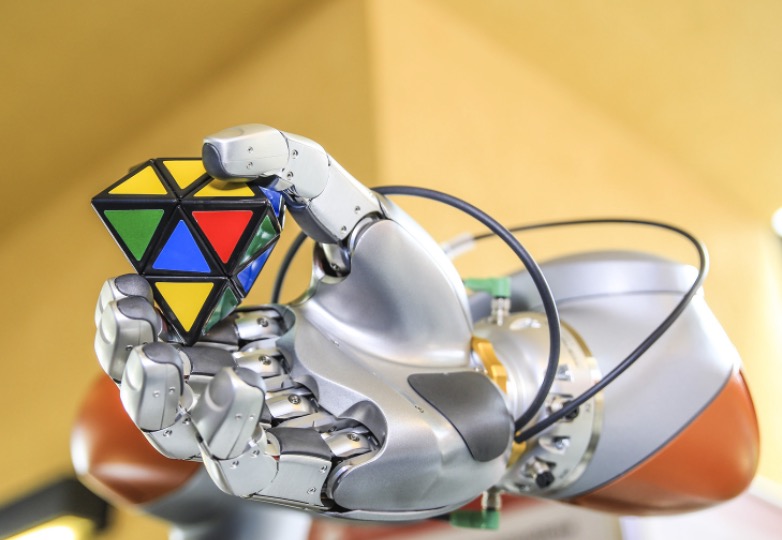
Grasping and Inhand Manipulation
|
 |
 |
Mechatronic Design
|
Haptics for Manipulation
|
|
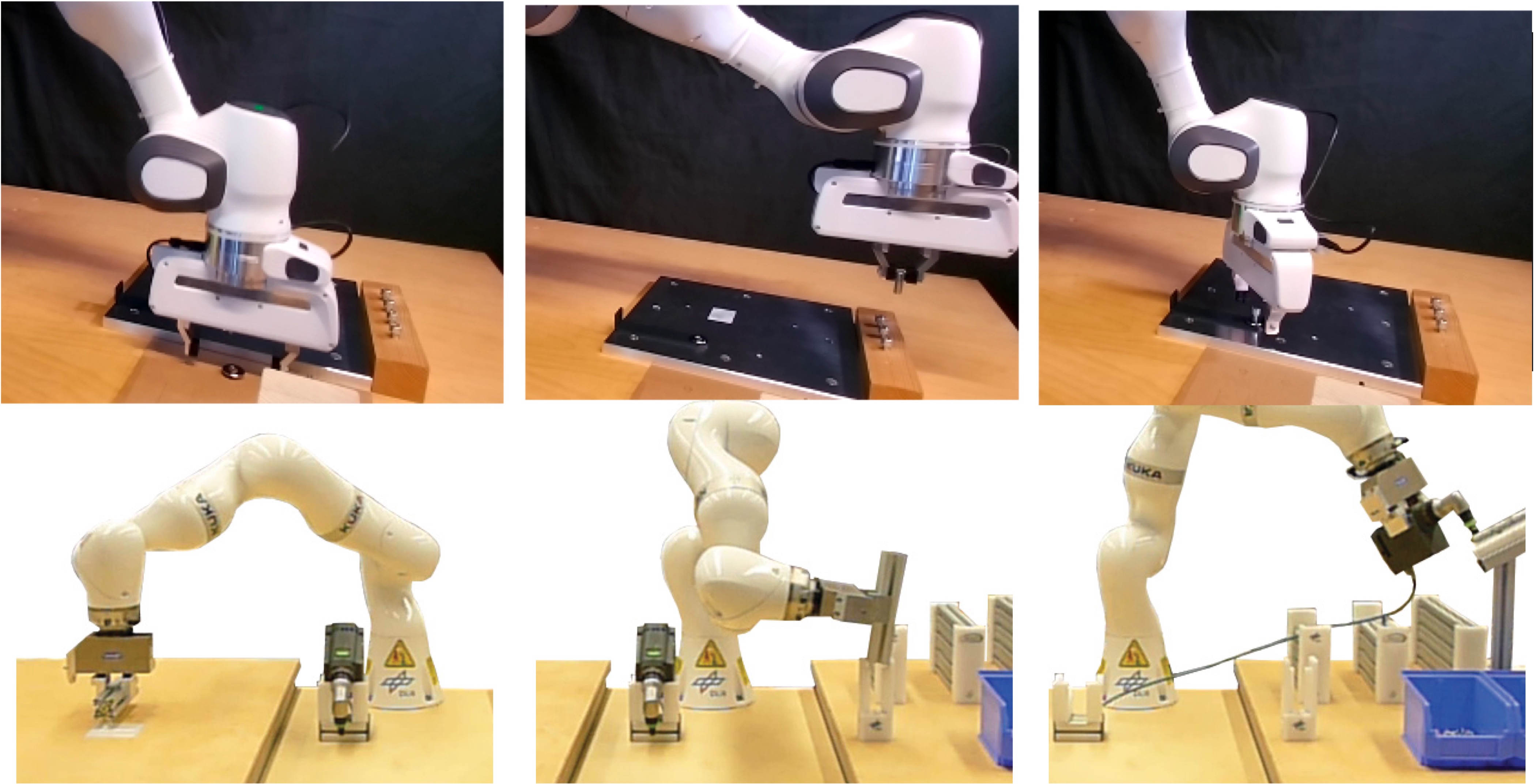 |
Manipulation Planning and Learning
|
| Contact |
|
| Funding |   |