
Aktuelles
2025
31.3.2025 - 4.4.2025: We show our project aiRobot on the Hannover Fair!
We are proud on our project results and that we were able to show our aiRobot project towards society on the this years Hannover Fair. Our project was selected by the Federal German Ministry of Science and Education among 9 other projects to be presented on the booth. It was an exhaustive but great week with many new contacts and discussions. Thank you for giving us such a great opportunity!
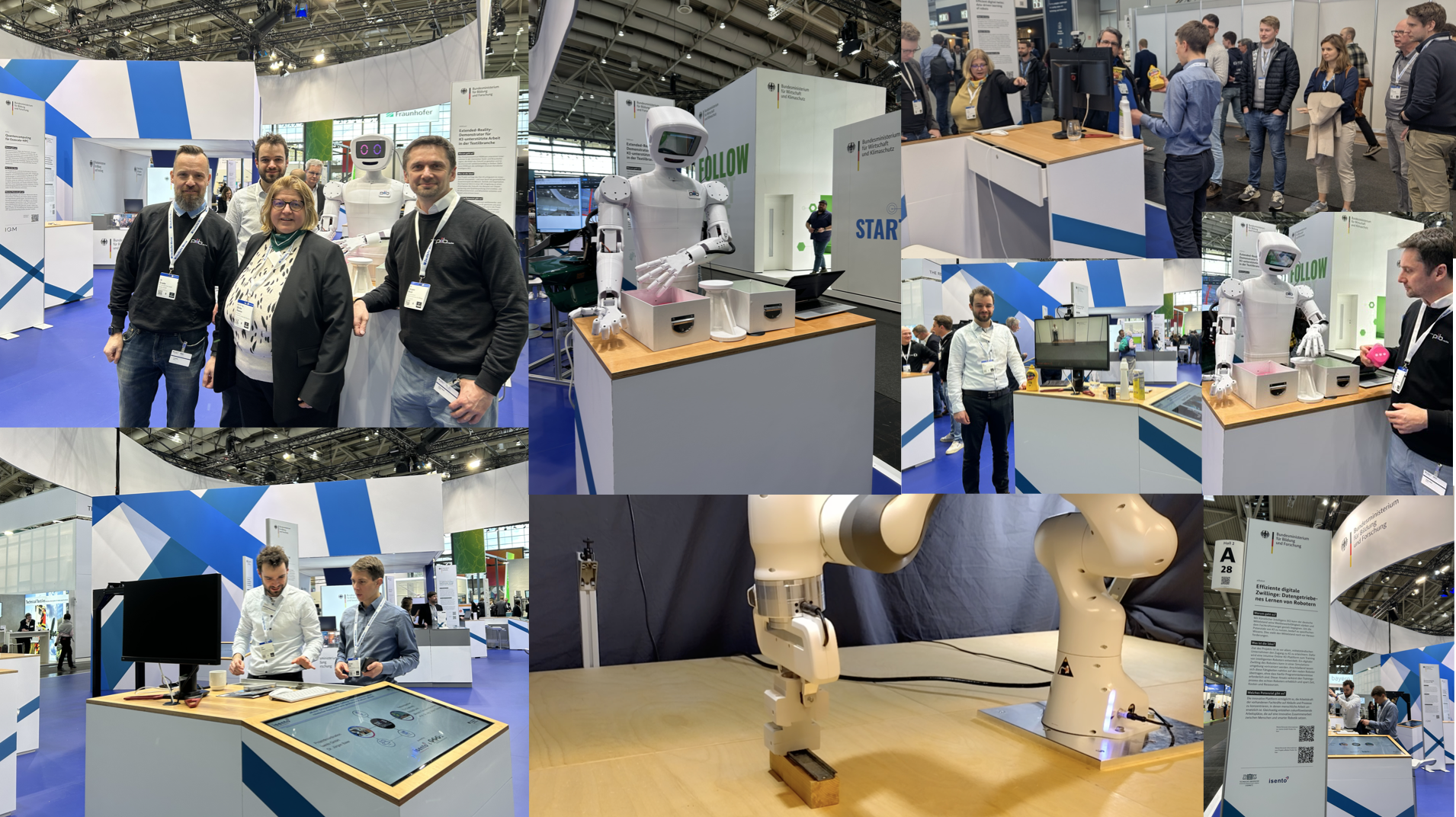
We presented our Software and KI Architectures necessary to learn the robot certain things like plugging a socket on a hat tail or stacking mugs in order to collect them like a waiter. The isento company presented the Pip robot a poor 3d printed robot for schools and young scientist to play with. Our new outstanding Deep Neural Network for human-robot-interaction which simultaneously tracks hand and objects has been presented.
26.3.2025 - 28.3.2025: EU Robotics Forum - Stephan Schwarz gave an invited talk!
Stephan Schwarz was invited to give a talk at this year´s European Robotics Forum in Stuttgart. Within the workshop “TeleRobotics 360: Exploring Innovations from Healthcare to Industry“ he presented his recent research with the title “Safety and Usability in telemanipulated Human-Robot Interactions” and participated in a panel discussion regarding the development and challenges of telemanipulation.

13.3. 2025 - 15.3.2025: We were exited about the 1st Conference on the Robotics Institute Germany!
Professor Ulrike Thomas is coordinator for RIG at TU Chemnitz. The TU Chemnitz contributed with 10 papers! The conference aims to bring researches in the field of robotics and artificial intelligence together. It took place in Nurnberg. We will be happy to seeing you next year again. Meanwhile the RIG will be organized in clusters and the TU Chemnitz Group contributes to the clusters. It is a step towards the right direction. The conference articles were non pre-reviewed, but nevertheless this does not diminish their achievements! Congratulation to all of them.
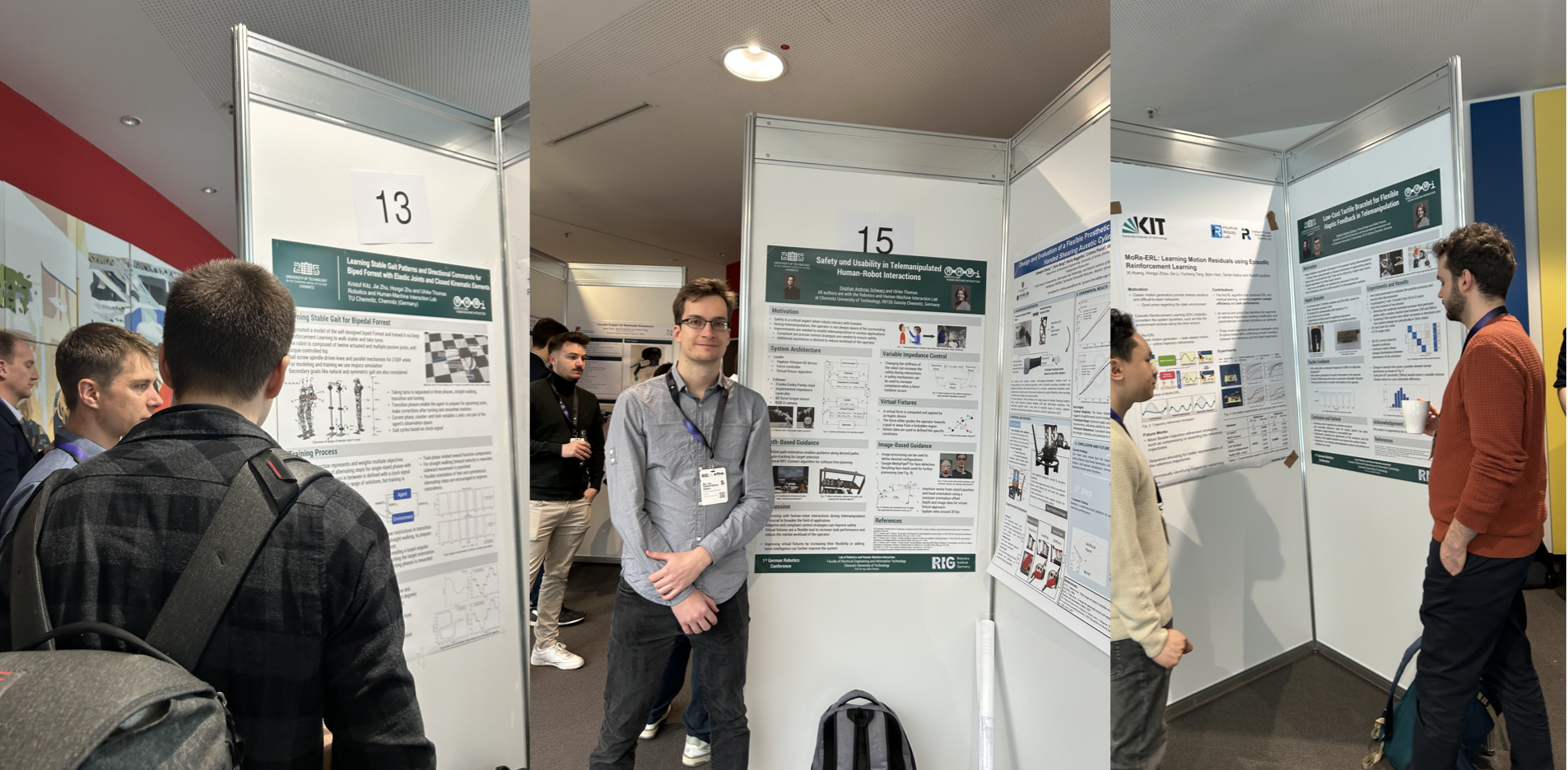
Kristof Kitz, Stephan Schwarz and Carl Gäbert present their posters on the first RIG "Robotics Institute German" conference in Nürnberg. This conference was among keynote presentation and panel discussion established to give young scientist and PhD students the possibility to present their work.
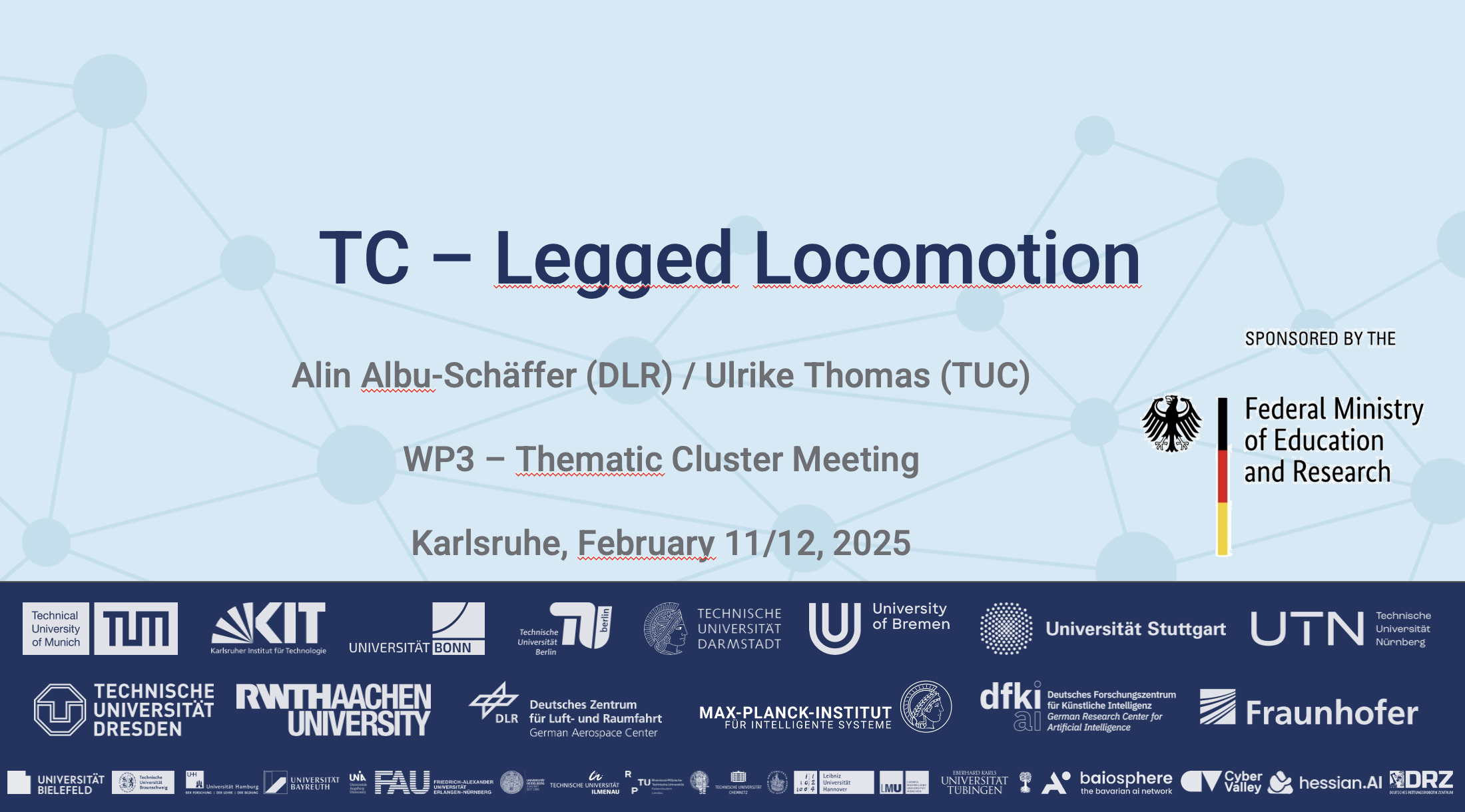
11.2.2025 - Prof. Ulrike Thomas was invited on the RIG-Meeting in Karlsruhe
Prof.Thomas presented the cluster legged locomotion in the first two days RIG-Meeting in Karlsruhe. We participated in a couple of clusters, where we were invited.
21.1.2025 - Prof. Ulrike Thomas was invited Speaker at well known IEEE/SICE Symposium on Systems Integration
Professor Thomas gave an invited talk about Assembly Sequence Planning on the prestiges IEEE Symposium. The title of the talk was "The Transformation from Planning to Learning in Robotics Systems". Moreover she took part in the international panel discussion with contributors from Japan, US and Germany about "Reconfigurable Manipulation Robots".

2024
22.11.2024 - 24.11.2024: IEEE-RAS Conference on Humanoid Robots - Carl Gäbert gives a presentation in France
On the international Conference on Humanoid Robots, Carl Gäbert presented his work: Generating dual arm inverse kinematics solution using latent variable models.

28.11.2024: Projektwerkstatt Medizinrobotik: Prof. Thomas gave a presentation about our activities in Telerobotics
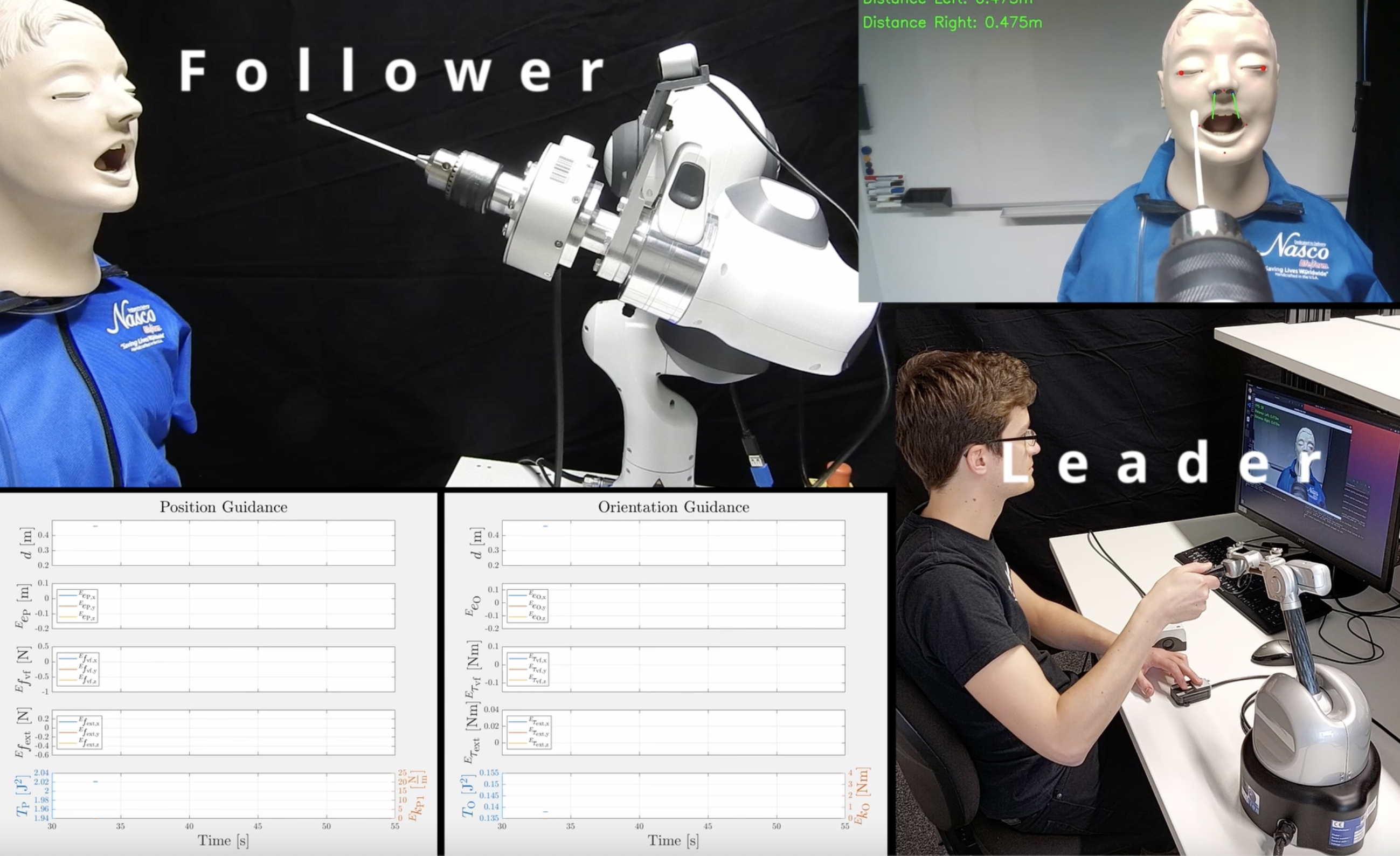
Prof. Thomas visited the Projektwerkstatt in Leipzig and gave a presentation about telemanipulation for medical applications. Currently we are seeking for project partners in telemedicine and telemanipulation. Stephan Schwarz implemented the tele- manipulated Corona test. The system can be used for many more use cases in medicine and other applications.
14.10.2024 - 18.10.2024: The IEEE/RSJ International Conference on Robots and Intelligent Systems in Dubai
Stephan Schwarz presented the paper: "6D Variable Fixtures for Telemanipulated Insertion Tasks" on the prestigious IEEE/RSJ IROS Conference this year.

10.7 - 11.7. 2024 Dijon - France - Best Student Paper Award on the DeLTA 2024 - International Conference on Deep Learning Theory and Applications
On the the 5th DeLTA Conference, Chaitanya Bandi received the Best Student Paper Award. This is a great achievement we are proud on his paper: " Action Conditioned Attention Encoder-Decoder Discriminator for Human Motion Generation". Congratulation to such a nice success. The conference was participated by more than 1000 people over the world!

21.6.2024: Bruno Siciliano visited our Lab.
Bruno Siciliano visited our Lab on 06/21/2024 and tested our systems. We enjoyed his stay and agreed to start collaborations!

From left to right: Ulrike Thomas, Guiseppe Sanseverino, Stephan Schwarz, Bruno Siciliano, Chaitanya Bandi and Hongxi Zhu.
18.6.2024 - 19.6.2024: Konferenz KI basierte Robotik KIRO 2024 im BMBF

Prof. Dr. Angela Schoelling (Technische Universität München) and Prof. Dr. Tamim Asfour (Karlsruher Institut of Technology) nehmen die Gratulation und den Bescheid zum Start des RIGs "Robotics Institute Germany" von der Bundesministerin Stark-Watzinger in Berlin entgegen.
Herr Philipp lobte in seiner Rede die hohe Motivation der Robotik Community, die Weiterentwicklung des Forschungsfelds nach den Werten der EU voranzutreiben.
Dr. Elsa Kirchner (Uni Duisburg-Essen) argumentierte in ihrer Keynote „Smarte Robotik im Kontext der technologischen Souveränität“, dass Schlüsseltechnologien für die Robotik in Europa produziert werden müssen, um Souveränität dauerhaft gewährleisten zu können.
Thomas Hähn, Leiter der HAHN Automation Group, sprach in seiner Keynote „Innovation durch Technologie: Die Potenziale der KI-basierten Robotik für Deutschland“ über Hürden für Investitionen und für die Schaffung von Vertrauen in Robotik.
Prof. Dr. Angela Schoellig (TUM) und Prof. Dr. Tamim Asfour (KIT) stellten das Robotics Institute Germany (RIG) vor: Zusammenschluss von zehn Universitäten und vier außeruniversitären Einrichtungen – zudem 15 assoziierte Universitäten und vier assoziierte Netzwerke. Schwerpunkte: KI und Robotik. Ziele: Stärkung der globalen Wettbewerbsfähigkeit und Sicherung der technologischen Souveränität Deutschlands in der KI-basierten Robotik"
Prof. Sami Haddadin hielt einen Vortrag „ActGPT: Foundation Models für Roboter“ Daran werde aktuell bereits gearbeitet ...
In einer Paneldiskussion diskutierten Prof. Dr. Angela Schoellig, Prof. Dr. Ulrike Thomas, Dr. Werner Kraus, Prof. Dr. Oliver Brock, Prof. Dr. Norbert Elkmann und Prof. Dr. Kai Oliver Arras zu „F&E-Herausforderungen in der intelligenten Robotik“. Dabei stellten sie drei Kernfelder für die weitere Forschung heraus: (1) Die Interaktion mit sozialer Robotik, die enorm wichtig für die gesellschaftliche Akzeptanz von Robotik sei; (2) Der Ease-of-use, also die einfache und intuitive Interaktion und Bedienung von Robotik, die eine wirkliche Skalierung von Robotik ermöglicht; und (3) die grundlegende Bedarfsorientierung, bei der die Anwendenden im besten Fall selbst die Robotik (mit-)entwickeln.
Prof. Ulrike Thomas is coordinator for the TU Chemnitz group for RIG.
Juni 2024, we received a new European Patent of an elastic robot joint!
Hongxi Zhu and Ulrike Thomas own three patents for new elastic robot joints. Two patents are granted by the "German Patent Amt" and one is granted by the European Patent Office.
28.5.2024: TU-Day we present our work
We have a booth and Prof. Ulrike Thomas presents our perspective about KI based robotics.
27.2.2024 -29.2.2024: We are suggested for the Best Paper Award on the 19th International Conference on Computer Vision Theory and Applications!
Rom, Italy, 27.2.2024 Chaitanya Bandi gave a talk about "Hand Mesh and Object Pose Reconstruction " and was suggested for the best conference paper. It is a huge success to be finalist at this prestiges conference! Congratulation to him.
7.2.2024 - 9.2.2024: IFSR Winter Conference on Robotics, Automation and Communication for Industry 4.0/5.0
Stephan Schwarz presents the paper "Virtual Guided Telemanipulation using Neural RRT based Planning", authors by Stephan Schwarz, Carl Gäbert, Benedikt Nieberle und Ulrike Thomas.





