Human-Robot-Interaction
Learning Human Like Trajectories
|
 |
|
 |
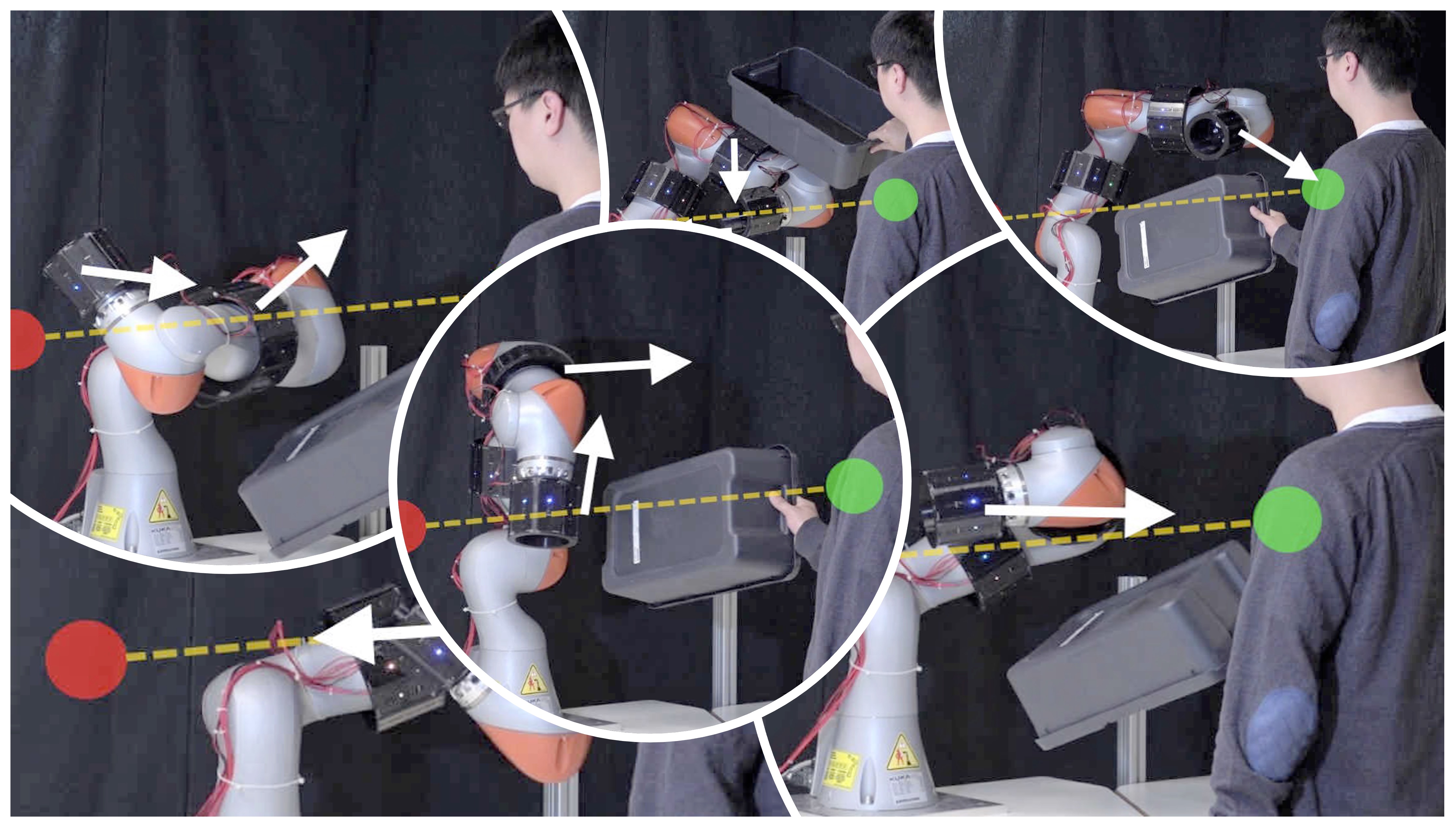
Hand-Over of Objects
|
|
Control via Gaze and Gestures
|
|
|
 |
Safety and Reactive Motions
|
|
Teaming in Production
|
 |
|
|
Contact |
Carl Gäbert, MSc. |
Prof. Dr.-Ing. Ulrike Thomas |
| Funded by |   |
|