Systems and Patents
We have build a new Biped Robot Forrest. 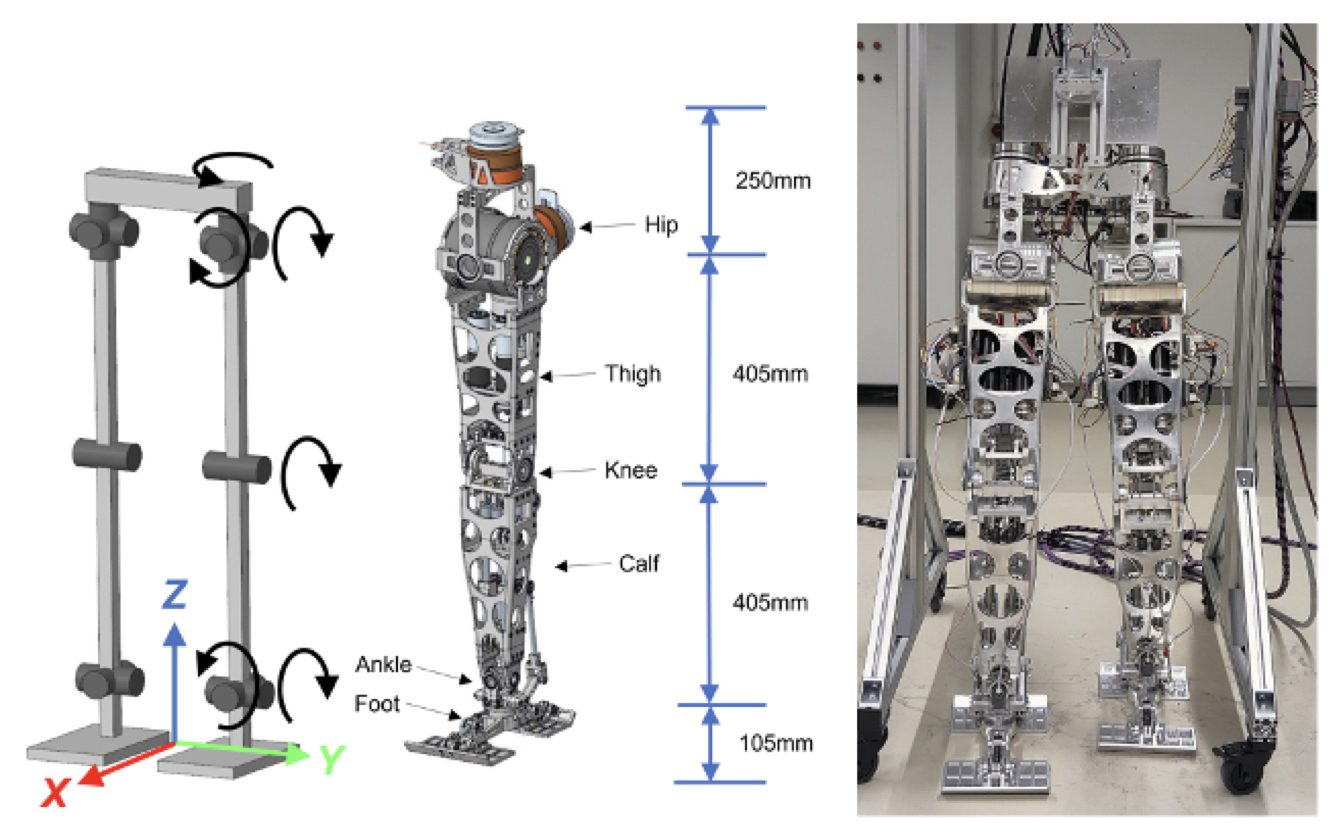
We own two patents on non linear mechanically elastic joints. German Patent Numbers 10 2018 008 378 and Number 10 2021 000619. The first patent is also published in: H. Zhu, U. Thomas A New Design of a Variable Stiffness Joint 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) DOI: 10.1109/AIM.2019.8868648
Our own very fast path planning toolbox has been published. It combines collision free sampling based motion planning with direct learning and will be applicable for one and two robotic arm systems. C. Gaebert, S. Kaden, B. Fischer, U. ThomasParameter Optimization for Manipulator Motion Planning using a Novel Benchmark SetAccepted at IEEE International Conference on Robotics and Automation (ICRA), 2023
Since the year 2000 Ulrike Thomas gathered experiences in assembly sequence planning. She developed in the past years on of the most efficient assembly sequence planner world wide. It is continuously developed further by her group at TU Chemnitz and previously at the German Aerospace Center within the SME robotics project. https://youtu.be/2jYhdmk-pMg
We have recently published our own Eye-Gaze-Tracker, which available as ROS-Package soon! For more information. C. Bandi, U. ThomasA New Efficient Eye Gaze Tracker for Robotic ApplicationsAccepted at IEEE International Conference on Robotics and Automation (ICRA), 2023.




