Forschungsschwerpunkt Kognition und intelligente Manipulation
Gripping
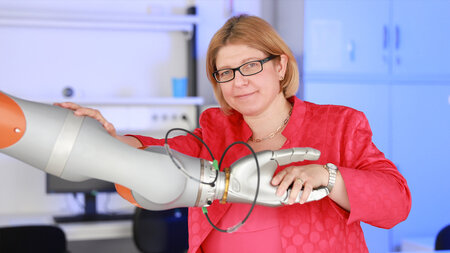
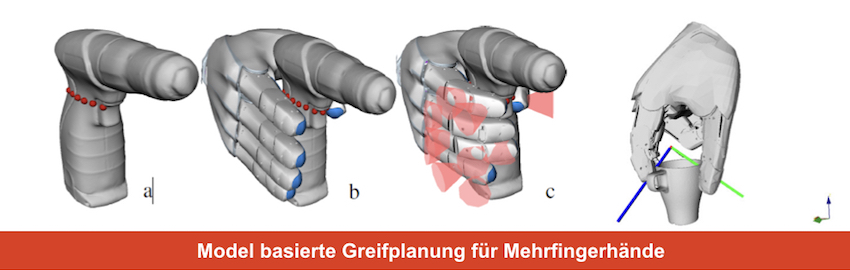
After a few years of practice, humans are able to grip known and unknown objects intuitively. The professorship has developed algorithms and methods for planning sensitive gripping, that do not need long learning phases, but can be executed on the basis of 3D- datasets. As a result, the robot can estimate the position of objects in its hand, even though they might not have been gripped precisely.
Gripping
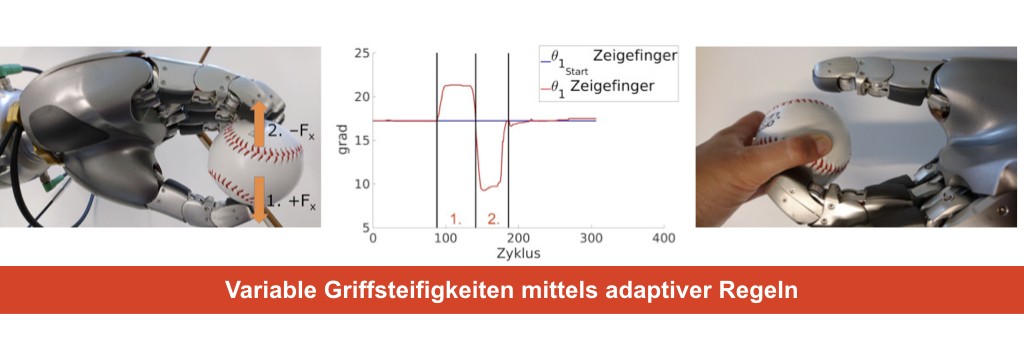
Furthermore, gripping processes can be executed very sensitively. Due to integrated torque value sensors within the joints of the HIT-hand, the contact forces can be manipulated and adjusted according to one’s needs. That means, that the robot will grip a ball stronger, if one tries to take it out of its hand or it can be ever so gentle when it comes to handling a raw egg. The professorship has developed an intelligent, adaptive controller, which will adjust the gripping forces accordingly in a dynamic way.
Collision-free Path Planning
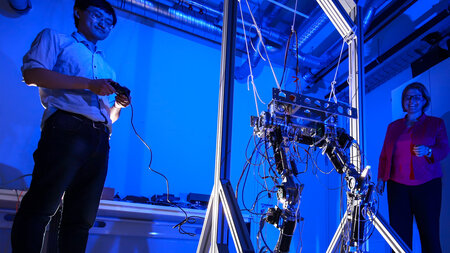
Collision-free path planning aim to transfer human intuition to robots so that it can react to its environment autonomously and avoid collisions. In order to achieve this, the professorship has developed software, which displays the robot and its environment. In this simulation, collision-free paths are being looked for. Also, Cartesian limitations can be implemented into the path planning process. A simple example would be the transport of a glass full of water without any of it being spilled.
Assembly planning
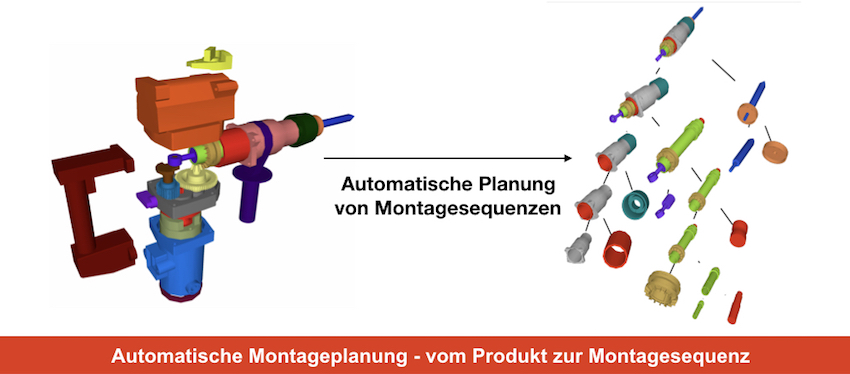
With automated assembly planning one can analyse assembly sequences and select suitable ones. Cartesian boundary conditions and physical boundary conditions are also focused on. Input data are CAD datasets of the individual parts, followed by the generation of geometrical possible sequences and rated by their feasibility. More boundary conditions, such as manageability and the tangibility of assembly parts can be taken into account by the selected assembly sequences. The assembly planning system developed has been awarded multiple times, both nationally and internationally.
Tools for intuitive robot programing
With LightRocks ((Light weight coding of robotic skills), a domain-specific tool for simple robot programming is available. With the support of-app-based programming, existing skills can be loaded and combined to complex programs. As a result, simple and intuitive programming of new processes has been made available for industrial production. Knowledge of robot-programming languages are not necessary anymore, if the robot needs to be configured for new tasks. LightRocks offers the opportunity to implement new sequences efficiently in new production places. The technology is based on MontiCore and helps to generate safe and certificating robot programming automatically.