Forschungsschwerpunkt Kognition und intelligente Manipulation
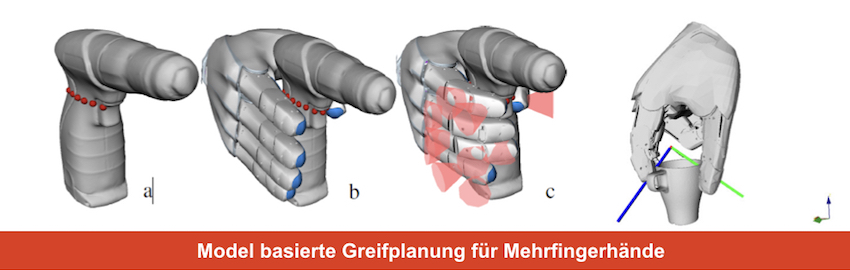
Greifen
Menschen können, nachdem sie es einige Jahre gelernt haben, intuitiv bekannte und unbekannte Objekte greifen. Wir haben daher Algorithmen und Methoden zum Planen von Griffen entwickelt. Diese benötigen keine langen Lernphasen, sondern können auf Basis von 3D-Daten planen. Dabei kann der Roboter auch bei nicht ganz exakt gegriffenen Objekten die Lage der Objekte in der Hand ertasten.
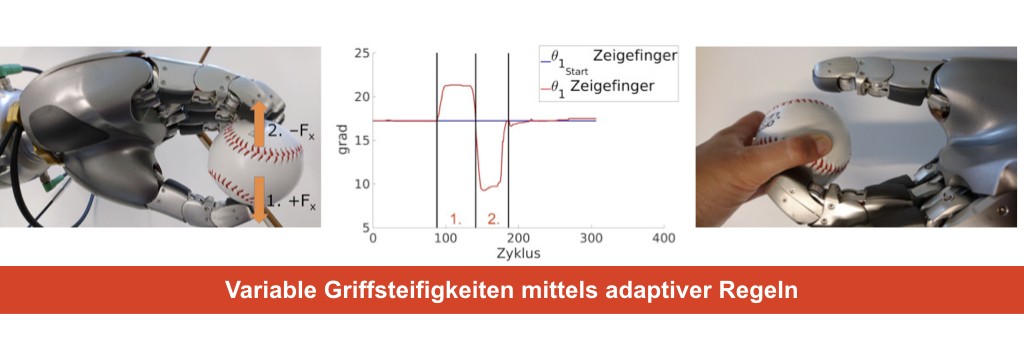
Greifen
Des Weiteren können Greifprozesse sehr feinfühlig gestaltet werden. Durch die integrierten Drehmomentsensoren in den Gelenken der HIT-Hand können Kontaktkräfte bei Bedarf nach geregelt und eingestellt werden. So kann der Roboter stärker zugreifen, wenn man versucht einen Ball aus der Hand zu ziehen oder auch ganz nachgiebig sein, wenn ein rohes Ei gegriffen werden soll. Hierfür haben wir einen intelligenten adaptiven Regler entwickelt, der die Greifkraft variable und dynamisch einstellt.
Kollisionsfreie Bahnplanung
Das Ziel der Bahnplanung ist die Intuition des Menschen auf den Roboter zu übertragen, sodass dieser autonom auf seine Umgebung reagieren kann und Hindernissen ausweichen kann. Hierfür haben wir eine Software entwickelt, welche den Roboter und seine Umgebung modelliert. In dieser Simulation kann dann nach kollisionsfreien Pfaden gesucht werden. Des Weiteren können kartesische Beschränkungen in die Pfadplanung integriert werden. Als einfaches Beispiel hierzu wäre der Transport von einem gefüllten Glas Wasser, ohne dass das Wasser verschüttet wird.
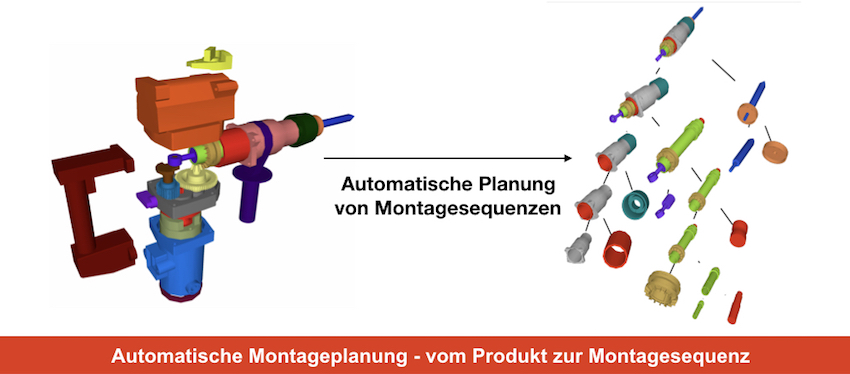
Montageplanung
Mit einer automatisierten Montageplanung lassen sich Montagereihenfolgen analysieren und geeignete auswählen. Hierbei werden kartesische Randbedingung und auch physikalische Randbedingungen betrachtet. Als Eingabe für die Planung sind CAD-Daten der Einzelteile notwendig. Anschließend werden geometrisch mögliche Reihenfolgen generiert und diese hinsichtlich der Durchführbarkeit bewertet. Die Auswahl von Montageplänen werden in Form von Montagegraphen ausgegeben. Weitere Randbedingungen, wie die Handhabbarkeit und die Greifbarkeit von Bauteilen, können bei den ausgewählten Montagereihenfolgen berücksichtigt werden. Das Montageplanungssystem wurde bereits mehrfach mit Forschungspreisen auf nationalen und internationalen Veranstaltungen ausgezeichnet.
Werkzeuge für eine Intuitive Roboterprogrammierung
Mit LightRocks (Light weight coding of robotic skills) steht ein Domain-spezifisches Werkzeug zur einfachen Programmierung von Robotern zur Verfügung. Es können mittels einer App-basierten Programmierung vorhandene Skills geladen und zu komplexen Programmen kombiniert werden. Damit soll eine einfache und intuitive Programmierung von Prozessabläufen in neuen Produktionsanlagen für Werker ermöglicht werden. Kenntnisse einer Roboterprogrammiersprache sind nicht mehr notwendig, um Roboter einfach für neue Aufgaben zu konfigurieren. LightRocks bietet die Möglichkeit neue Systeme effizient in Fertigungsanlagen zu integrieren. Die Technologie basiert auf MontiCore und hilft sichere, zertifizierbare Roboterprogramme automatisch zu generieren.