BA: Enhancing the Dynamic Balance of a Biomimetic Mouse Robot via Lateral Spinal Flexion
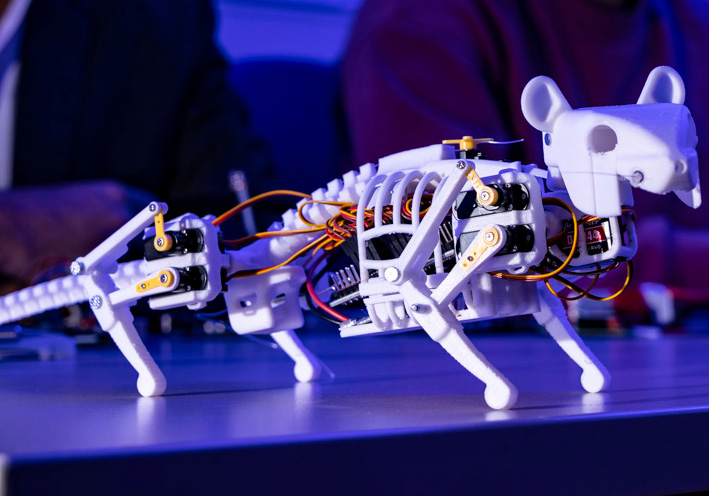 Image of our mouse robot (old Version).
Image of our mouse robot (old Version).Based on NeRmo, a biomimetic mouse robot developed by TUM, we have built our own robot, which is intended for use in research and education. In addition to the ability to perform actions in its environment, the robotic agent's perception capabilities play a significant role. For example, so-called whisker sensors were developed at our professorship and integrated into the system - a very important perceptual component for such a rodent. With another sensor, an IMU, the sense of balance can be modelled within the system.
As part of your work, you will focus on integrating and leveraging the lateral flexion of the robot's spine to enhance walking stability. Our specific platform is based on the simplified NeRmo Light architecture, featuring tendonless legs and a modified spine restricted exclusively to lateral bending, all controlled by an onboard ESP32. Utilizing real-time data from the head-mounted IMU, your task is to investigate how coordinated spinal movements can optimize dynamic balance, particularly during locomotion and cornering maneuvers. Building upon the methodologies presented in the foundational paper Lateral flexion of a compliant spine improves motor performance in a bioinspired mouse robot, your concrete goals will include developing closed-loop control algorithms for spinal-limb synchronization, implementing spine-based stride extension, evaluating stability metrics through practical experiments, and demonstrating a measurably more robust and stable walking gait.
Advisor:
- Sven Lange, sven.lange@…
Requirements:
- Basic knowledge in Linux/Ubuntu would be good.
- Basic knowledge in microcontroller usage and programming.