BRIEF-Gist
Modern SLAM systems are typically based on the efficient optimization of probabilistic constraint or factor graphs. These systems are generally divided into a back-end and front-end. The back-end contains the optimizer that builds and maintains a map by finding an optimal solution to the robot's trajectory and the landmark positions given the constraints constructed by the front-end. This front-end is responsible for data association in general and, in the context of pose-only SLAM, place recognition in particular. Reliable place recognition is a hard problem, especially in large-scale environments. Repetitive structure and sensory ambiguity constitute severe challenges for any place recognition system. As optimization based back-ends for SLAM like iSAM, Sparse Pose Adjustment, iSAM2, or g2o are not robust against outliers, even a single wrong loop closure will result in a catastrophic failure of the mapping process. Recent developments in appearance-based place recognition therefore aimed at reaching a high recall rate at 100% precision, i.e. they concentrated on preventing false positives. This of course leads to computationally involved, very complex systems. In parallel work, we developed a robust formulation to pose graph SLAM that allows the optimizer in the back- end to identify and reject wrong loop closures. This can be understood as enabling the back-end to take back any data association decision of the front-end. Given this robust back-end, the need of reaching a precision of 100% during the data association (i.e. place recognition) process is eliminated. The place recognition system in the front-end can therefore be kept simple and focused on a high recall rate, as a reasonable number of false positive loop closures is acceptable.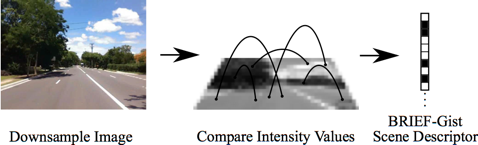 We propose BRIEF-Gist, an appearance-based
place recognition system that builds upon the BRIEF descriptor by Calonder et al. We evaluated BRIEF-Gist
and concluded that our approach is suitable to perform place
recognition in large scale scenarios, despite its simplicity
regarding implementation and computational demands.
Please see the paper below for further information and details.
We propose BRIEF-Gist, an appearance-based
place recognition system that builds upon the BRIEF descriptor by Calonder et al. We evaluated BRIEF-Gist
and concluded that our approach is suitable to perform place
recognition in large scale scenarios, despite its simplicity
regarding implementation and computational demands.
Please see the paper below for further information and details.
Publications
- Sünderhauf, N., Protzel, P. (2011). BRIEF-Gist -- Closing the Loop by Simple Means. Proc. of IEEE International Conference on Intelligent Robots and Systems (IROS), San Francisco, USA.