Auf zum RoboCup nach Leipzig
Professuren der Fakultät für Informatik und der Fakultät für Elektrotechnik und Informationstechnik stellen vom 30. Juni bis 3. Juli aktuelle Forschungsprojekte aus der Robotik in der Messestadt vor
-

Projekt: "H-RoC - Human Robot Cooperation": Der Roboter "Daimos" erkennt menschliche Gesten und Pposen, um auf der Baustelle entsprechend zu reagieren. "Achtung" lautet die ausgeführte Kommandogeste von Stefan Schubert. Nicht nur durch menschliche Gesten und akustische Rufe kann der Roboter angesprochen und gesteuert werden. Foto: Vera Fink -
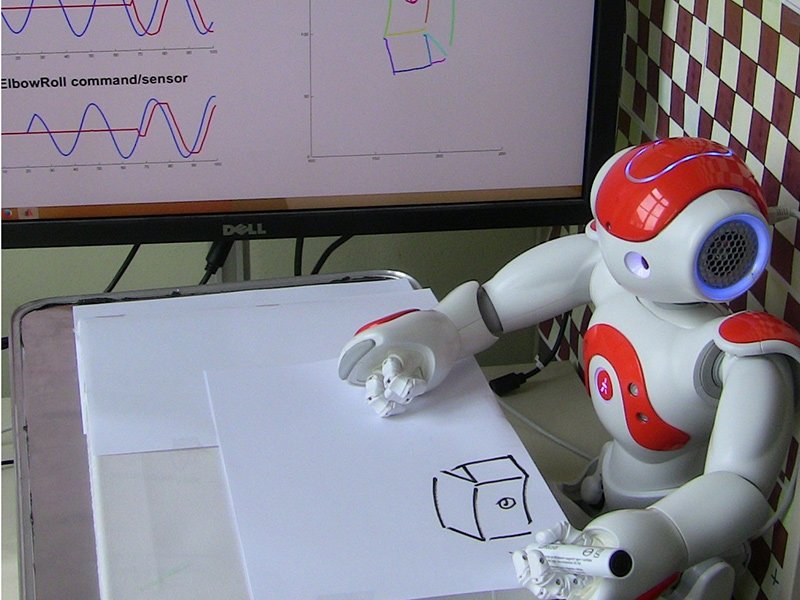
Projekt „Neurorobotik“: Einem humanoiden Roboter werden verschiedene Bewegungsmuster beigebracht. Je größer der Vorrat an derartigen Bewegungsmustern ist, um so besser lassen sich rhythmische und diskrete Bewegungen erzeugen. Foto: John Nassour
Es ist der führende und vielseitigste Wettbewerb für intelligente Roboter und eines der international bedeutendsten Technologieevents in Forschung und Ausbildung. Vom 30. Juni bis 3. Juli kommen 3.500 Teilnehmer aus über 45 Ländern und Regionen zum RoboCup nach Leipzig. Sie alle eint dabei eins: Vorfreude auf den inspirierenden Austausch rund um den aktuellen Stand der Robotik. In der Messestadt mit dabei sind auch die Professur Grafische Datenverarbeitung und Visualisierung, die Professur Technische Informatik, die Professur Medieninformatik, die Professur Künstliche Intelligenz sowie die Professur Prozessautomatisierung der Technischen Universität Chemnitz. Sie stellen im Rahmen der MINT-Ausstellung des Sächsischen Staatsministeriums für Wirtschaft, Arbeit und Verkehr in der Halle 2 auf dem Leipziger Messegelände aktuelle Projekte vor, an denen sie gemeinsam mit anderen Wissenschaftlern aus der Robotik forschen.
Der kooperative Baumeister
Bis vor kurzem wurden Roboter hauptsächlich in Fabriken eingesetzt. Ihre sensorischen Fähigkeiten waren begrenzt und auch ihr Einsatzbereich, um die Sicherheit des Bedienpersonals nicht zu gefährden. Seit einigen Jahren bewältigen jedoch zunehmend intelligente Serviceroboter Aufgaben, die für Menschen beispielsweise zu monoton oder zu gefährlich sind. Diese Roboter bilden eine interdisziplinäre Anwendung zwischen Maschinenbau, Elektrotechnik und Informatik. Dabei ergeben sich mitunter schwierige und noch ungelöste Forschungsfragen zur Kooperation zwischen Menschen und „intelligenten“ mobilen Robotern.
Hier ist auch das Forschungsprojekt "H-RoC - Human Robot Cooperation" angesiedelt. Wissenschaftler der TU Chemnitz und der HTW Dresden forschen interdisziplinär an Methoden zum Einsatz mobiler Roboter in unstrukturierten Umgebungen und deren Interaktion und Kooperation mit Menschen. Das zentrale Anwendungsszenario ist eine Baustelle, auf der die menschlichen Arbeiter von einem Roboter bei Transport-, Navigations- und Überwachungsaufgaben unterstützt werden. Die zentralen Forschungsfragen konzentrieren sich zum einen auf die Navigation des autonomen Roboters und dessen Kommunikation mit der Leitstelle. Zum anderen geht es vor allem um dessen Kommunikation mit den menschlichen Arbeitern. Dies soll dabei über möglichst intuitive Kanäle geschehen, von der Verwendung von Touchpads bis hin zur unmittelbaren Kommunikation über Körpergesten und Sprache. Aus diesem Grunde beteiligen sich mehrere Professuren der Fakultäten für Elektrotechnik und Informationstechnik sowie Informatik der TU Chemnitz und der Fakultät für Informatik/Mathematik der HTW Dresden an diesem Projekt, welches im Rahmen der Verbundinitiative "RoX - Robots in Saxony" des Sächsischen Staatsministeriums für Wissenschaft und Kunst gefördert wird. www.robotsinsaxony.de
Weitere Informationen zu diesem Projekt erteilen Christian Rau, Professur Graphische Datenverarbeitung und Visualisierung Angewandte Informatik, Telefon 0371 531-32497, E-Mail christian.rau@informatik.tu-chemnitz.de, sowie Prof. Dr. Guido Brunnett, Telefon unter 0371 531-31533, E-Mail guido.brunnett@informatik.tu-chemnitz.de.
Zum besseren Verständnis des menschlichen Gehirns
Die Professur für Künstliche Intelligenz und neuro-kognitive Systeme unter Leitung von Prof. Dr. Fred H. Hamker verfolgt aktuell einen experimentellen und modellgetriebenen Ansatz zur Erforschung der Funktionsweise des Gehirns, mit dem Ziel neuartige, intelligente, kognitive Systeme zu entwickeln. Es werden Modelle entwickelt, die psychologische und neurowissenschaftliche Daten interpretieren helfen, womit ein direkter Beitrag zum Verständnis des Gehirns geleistet wird. Ebenso wird am Transfer neurowissenschaftlicher Erkenntnisse in technische Anwendungen gearbeitet. Mit der Akkumulation des Wissens in der Hirnforschung entstehen zeitgleich bessere intelligente Systeme, die nach biologischem Vorbild arbeiten.
Projekt „Neurorobotik“
Die Forschung im Bereich Neurorobotik zielt darauf ab, eine enge Verbindung zwischen Robotik und den Neurowissenschaften zu etablieren. Dazu entwickeln die Chemnitzer Informatiker kognitive Modelle für menschenähnliche Roboter, die durch Kognition in biologischen Systemen inspiriert sind. Ihr besonderes Interesse gilt der Generierung und dem Erwerb von motorischen Fähigkeiten, die humanoiden Robotern mehr Interaktivität verleihen sowie zu mehr Flexibilität in wechselnden Umgebungen führen. Dazu erzeugen sie rhythmische Bewegungen (wie etwa Laufen) und diskrete Bewegungen (z.B. Greifen) anhand neuronaler Modelle, die vom Rückenmark von Wirbeltieren inspiriert sind. Diese Modelle werden durch Mechanismen gesteuert, die durch imitierte Gehirnfunktionen auf Basis von Sensoren mit der Umgebung interagieren. Nachdem ein internes Modell für die Welt und für Interaktionen erstellt wurde, sind Roboter dazu fähig, Aufgaben auszuführen und ihr Verhalten an Veränderungen in der Umwelt anzupassen.
Projekt Spatial Cognition (Räumliche Kognition)
Existierende Systeme zur Bildverarbeitung basieren primär auf Einzelbildern oder Bildsequenzen, aber widmen sich kaum dem Fall einer kontinuierlichen Wahrnehmung, während Handlungen ausgeführt werden. Wenn ein virtueller Agent von menschlicher Gestalt mit Kamerasensoren ausgestattet wird, entsteht die Frage, wie er beispielsweise den Ort eines kürzlich wahrgenommenen Objektes in Bezug zu den verschiedenen Referenzsystemen der Wahrnehmung – augenzentriert, kopfzentriert, körperzentriert oder weltzentriert – während seiner folgenden Handlungen aktualisiert. Im Rahmen des europäischen Forschungsprojekts „Spatial Cognition“ untersuchten Forscher der Professur für Künstliche Intelligenz diese Frage anhand kombinierter experimenteller Arbeiten und Simulationsstudien. Final flossen diese in ein Modell menschenähnlicher Raumwahrnehmung und räumlichen Gedächtnisses ein, das auf einem humanoiden Agenten in virtueller Realität getestet wurde. Im Rahmen des RoboCup-Events in Leipzig werden aktuelle Forschungsergebnisse erstmals öffentlich präsentiert. www.spacecog.eu
Projekt ANNarchy
Die in der Chemnitzer Forschungsgruppe entwickelten Modelle kognitiver Prozesse basieren auf künstlichen neuronalen Netzen. Um deren Anwendung zu erleichtern und das Potential aktueller paralleler Hardware (z. B. Grafikkarten) voll auszunutzen, wurde die Simulationssoftware Annarchy (Artificial Neural Networks architect) entwickelt. Ein Fortschritt zu existierender Software ist die Verbindung aus hoher Effizienz, auch auf paralleler Hardware, einfacher Handhabbarkeit und hoher Flexibilität für breite Anwendungsfelder.
Weitere Informationen zu den Projekten der Professur für Künstliche Intelligenz erteilen Dr. John Nassour, Telefon 0371 531-35246, E-Mail john.nassour@cs.tu-chemnitz.de, sowie Prof. Dr. Fred H. Hamker, Telefon 0371 531-37875, E-Mail fred.hamker@informatik.tu-chemnitz.de.
(Autoren: Christian Rau, Lorenz Gönner, Mario Steinebach)
Mario Steinebach
27.06.2016




