Robust Satellite Navigation with Generalized Factor Graphs
The smartLoc project focused on improving the accuracy and integrity of satellite-based localization in urban areas. A particular emphasis was placed on addressing the problem of multipath propagation, caused by reflections of satellite signals from buildings, which affects conventional fusion approaches. This so-called NLOS (Non-Line-of-Sight) problem poses a challenge as satellite signals can only be received indirectly, resulting in non-Gaussian measurement errors.
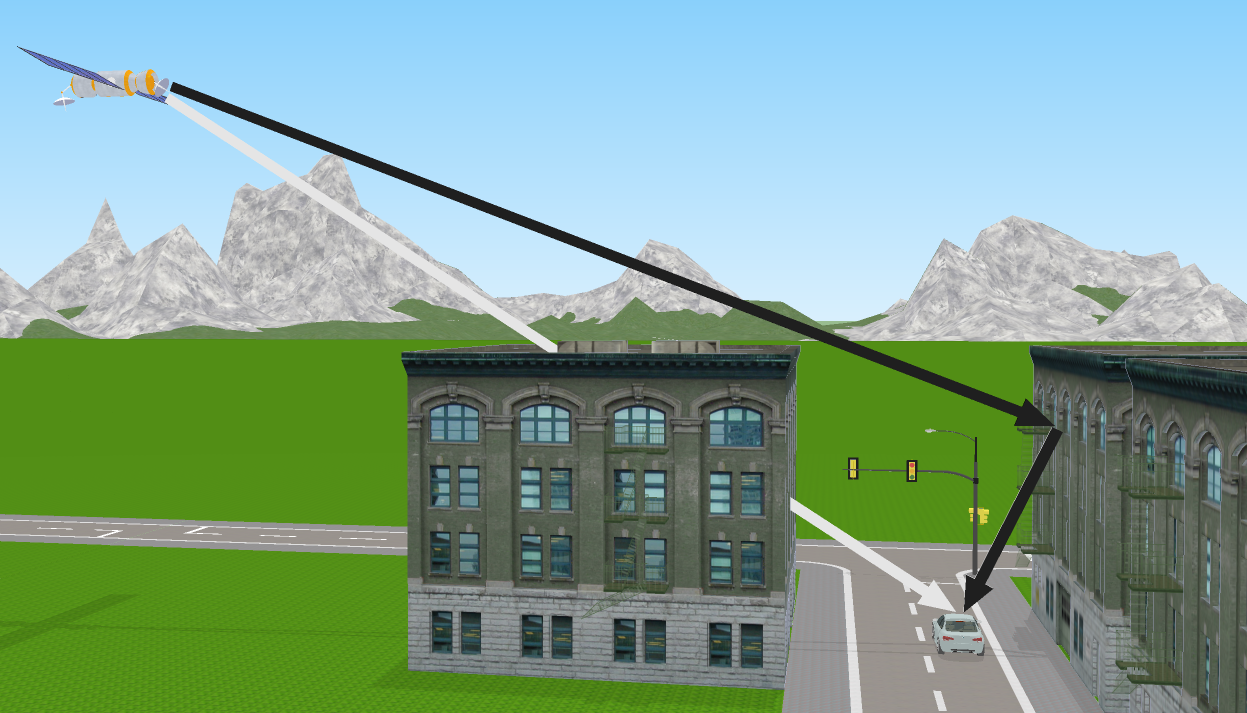
Source: Chair of Communications Engineering
Special attention was given to safety in localization, particularly for fully autonomous driving and driver assistance systems. The solution provided by adaptive generalized factor graphs does not require expensive new technologies and can be cost-effectively implemented using commonly available GNSS receivers in mass-market devices such as navigation systems, cars, and smartphones.
The smartLoc project has made a significant contribution to improving localization in urban areas. The developed software tools are versatile and offer opportunities for future developments in mobile robotics. The results of smartLoc have the potential to enhance the efficiency and accuracy of position measurement and contribute to the advancement of this technology. The findings have already been presented at international conferences, and additional publications are planned to make the acquired knowledge accessible.
The smartLoc project represents a significant milestone in the development of precise localization technologies and will contribute to enhancing the safety and performance of autonomous vehicles and driver assistance systems.
![]()