Robuste Satellitennavigation mit generalisierten Faktorgraphen
Das Projekt smartLoc konzentrierte sich darauf, die Genauigkeit und Integrität der satellitengestützten Lokalisierung in urbanen Gebieten zu verbessern. Dabei lag ein besonderes Augenmerk auf dem Problem der Mehrwege-Ausbreitung, die durch Reflexionen von Satellitensignalen an Gebäuden entstehen und die herkömmlichen Fusainsansätze beeinträchtigen. Dieses sogenannte NLOS (Non-Line-of-Sight) Problem stellt eine Herausforderung dar, da die Satellitensignale nur noch indirekt empfangen werden können, was nicht-normalverteilte Messfehler zur Folge hat.
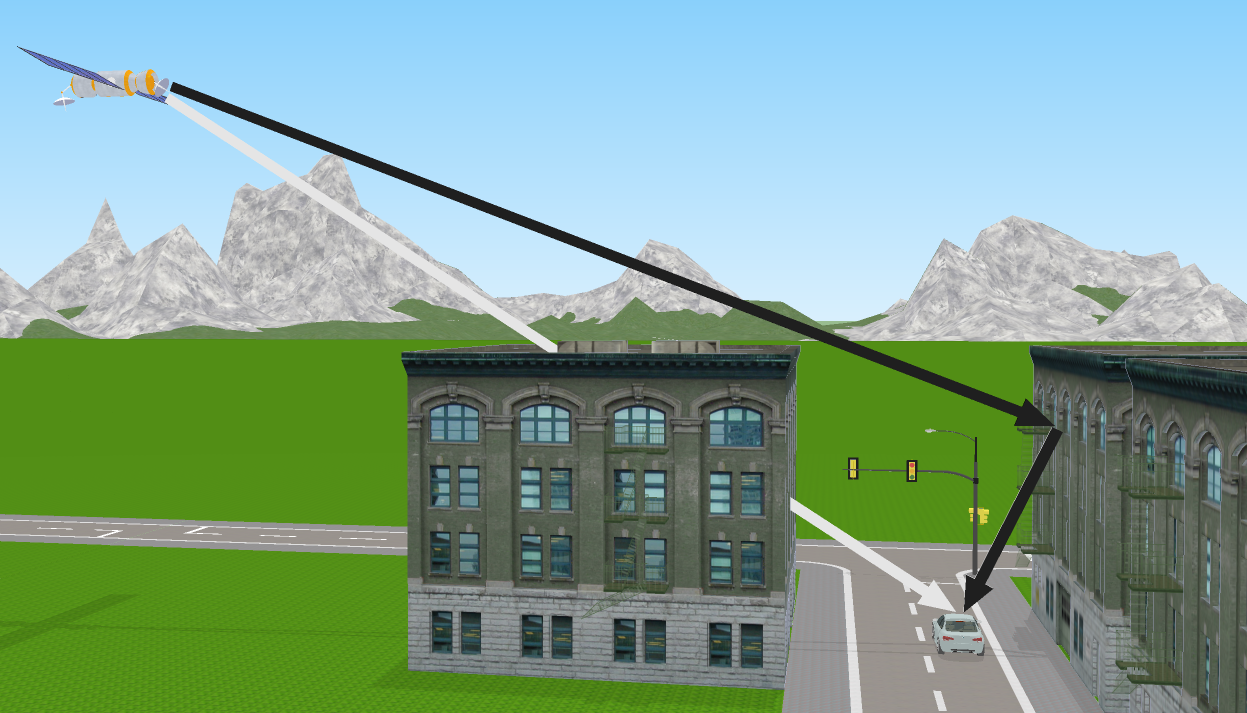
Quelle: Lehrstuhl Nachrichtentechnik
Besonderes Augenmerk lag dabei auf der Sicherheit in der Lokalisierung, insbesondere für vollständig autonomes Fahren und Fahrerassistenzsysteme. Lösung der adaptive generalisieren Faktorgraphen erfordert keine teuren neuen Technologien und kann kostengünstig mit den gängigen GNSS-Empfängern in massenmarkttauglichen Geräten wie Navigationssystemen, PKWs und Smartphones eingesetzt werden.
Das Projekt smartLoc hat einen signifikanten Beitrag zur Verbesserung der Lokalisierung in urbanen Gebieten geleistet. Die entwickelten Softwaretools sind anwendungsflexibel und bieten Möglichkeiten für zukünftige Entwicklungen in der mobilen Robotik. Die Ergebnisse von smartLoc haben das Potenzial, die Effizienz und Genauigkeit der Positionsmessung zu steigern und tragen zur Weiterentwicklung dieser Technologie bei. Die Ergebnisse wurden bereits auf internationalen Konferenzen präsentiert und weitere Veröffentlichungen sind geplant, um die gewonnenen Erkenntnisse verfügbar zu machen.
Das Projekt smartLoc stellt einen wichtigen Meilenstein in der Entwicklung präziser Lokalisierungstechnologien dar und wird dazu beitragen, die Sicherheit und Leistung autonomer Fahrzeuge und Fahrerassistenzsysteme weiter zu verbessern.
![]()