Mit interdisziplinärer Forschung zum Erfolg
Nachwuchsforschergruppe der TU Chemnitz entwickelt zukunftsorientierte Technologien für einen Leichtbau-Roboter - Präsentation auf der Jahreskonferenz der EU-Strukturfonds in Sachsen am 3. Mai 2012
-
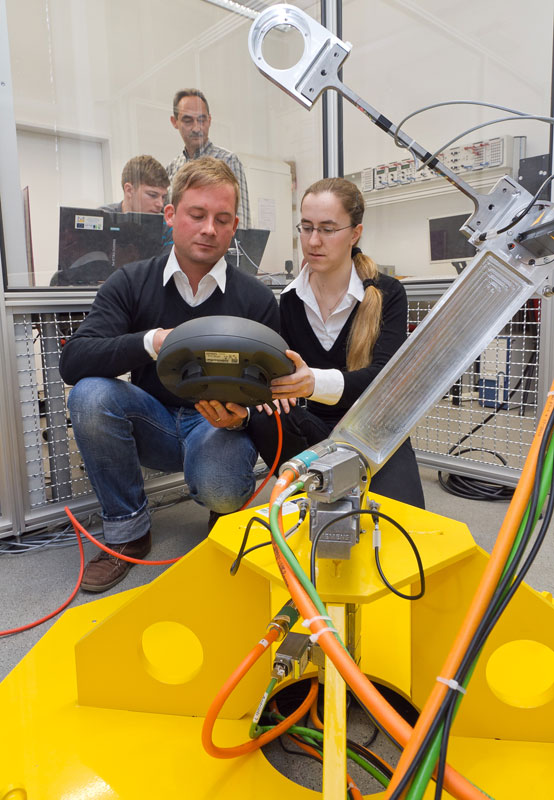
Juliane Hädrich und Michael Walther, beide Wissenschaftliche Mitarbeiter an der Professur Werkzeugmaschinen und Umformtechnik, untersuchen am Demonstrator Strategien zur erweiterten Sensordatenintegration und Regelung elastischer Roboterarme. Im Hintergrund: Projektleiter Dr. Holger Schlegel, Abteilungsleiter an der Professur Werkzeugmaschinen und Umformtechnik, diskutiert mit Student Matthias Lippold (l.) die Versuchsergebnisse. Foto: Christian Schenk
Immer schneller und damit preisgünstiger soll die Produktion ablaufen - egal, ob etwa ein Auto montiert oder Windräder gefertigt werden. Dadurch steigen die Anforderungen an Industrieroboter: Leicht und mobil müssen sie sein, hochautomatisiert, mobil und präzise. Diesem Ziel hat sich die Nachwuchsforschergruppe MoLeiRo der Technischen Universität Chemnitz verschrieben. Sie arbeitet am Thema "Weiterentwicklung zukunftsorientierter Technologien am Beispiel eines Leichtbauroboters". Die sieben beteiligten Wissenschaftler kommen aus den Professuren Werkzeugmaschinen und Umformtechnik, Strukturleichtbau und Kunststoffverarbeitung, Elektrische Energiewandlungssysteme und Antriebe, Robotersysteme sowie Prozessautomatisierung. Das Projekt wird von Oktober 2009 bis September 2012 gefördert von der Europäischen Union aus Mitteln des Europäischen Sozialfonds sowie aus Landesmitteln des Freistaates Sachsen.
Die Motivation der Arbeiten besteht in der Tatsache, dass konventionelle Roboter, wie sie beispielsweise zur Montage oder zum Schweißen industrieller Standard sind, ein hohes Eigengewicht zu Nutzlast-Verhältnis haben. Bedingt durch die hohen Massenträgheiten sind die maximalen Verfahrgeschwindigkeiten und Beschleunigungen dieser Systeme begrenzt. Außerdem stellen die hohen wirksamen Trägheitsmomente beispielsweise bei einer Kollision eine Gefahr für den Menschen sowie Objekte in der Umgebung des Roboters dar, weshalb diese nur hinter trennenden Schutzeinrichtungen oder bei reduzierter Geschwindigkeit zu betreiben sind.
Innerhalb des Forschungsprojektes wird ein Roboterarm aus kohlefaserverstärktem Kunststoff mit integrierter Sensorik und Aktorik entwickelt. Die unter einer Belastung oder durch eine Bewegung entstehende Verformung, die zu einem Bahnfehler am Endeffektor führt, wird mit modernen Methoden der Steuerungs- und Regelungstechnik kompensiert. Der Endeffektor ist das Bauteil des Roboters, das beispielsweise zum Schweißen oder als Greifer eingesetzt wird. Die Position dieses Endeffektors wird mit zusätzlicher Sensorik, wie Dehnungsmessstreifen, Beschleunigungssensoren sowie Gyroskopsensoren, bestimmt und in die Regelung der Kinematik einbezogen. Außerdem ist der Roboterarm bewusst elastisch gestaltet. Vorteile ergeben sich dadurch vor allem beim Kontakt des Roboters mit dem Menschen, da die hierbei auftretenden Kräfte deutlich reduziert werden können. Eine weitere Technologie, die im Rahmen des Projektes entwickelt wurde, ist ein Drehgelenk mit einstellbarer Steifigkeit. Durch dieses Gelenk kann beim Abbremsvorgang Energie gespeichert und bei Bedarf wieder freigesetzt werden. Dies führt dazu, dass ein Bewegungsvorgang entweder dynamischer oder energieeffizienter realisiert wird. Die Untersuchungen im Projekt zielen außerdem auf den Entwurf elektrischer Gelenkantriebe unter Berücksichtigung neuer Werkstoffe und Fertigungstechnologien. Durch die Steigerung der Drehmomentdichte des elektrischen Antriebs können auch hier die Baugröße und die Masse des Antriebs reduziert werden. Um die entwickelten Technologien auch für mobile Anwendungen, beispielsweise in der Servicerobotik, zu nutzen, besteht ein weiterer Schwerpunkt in der Erfassung der Umgebung sowie der Nutzung dieser Daten zur Steuerung einer mobilen Plattform.
Für den industriellen Einsatz eröffnen sich dadurch zukünftig neue Möglichkeiten. "Es ist denkbar, dass der Roboter in einer Art offenen Roboterzelle Arbeiten gemeinsamen mit dem Menschen ausführt und zwar ohne die Überwachung mittels kostenintensiver Sicherheitstechnik", so Michael Walther, Wissenschaftlicher Mitarbeiter an der Professur Werkzeugmaschinen und Umformtechnik. Dr. Holger Schlegel, Leiter des Projektes, ergänzt: "Die Ergebnisse der Nachwuchsforschergruppe bieten das Potenzial, zukünftig im Rahmen des Wissens- und Technologietransfers validiert und somit einer späteren wirtschaftlichen Verwertung zugeführt zu werden".
Die Nachwuchsforschergruppe präsentiert ihre aktuellen Arbeiten bei der Jahreskonferenz der EU-Strukturfonds in Sachsen, die unter dem Titel "Forscher entdecken!" am 3. Mai 2012 an der TU Chemnitz stattfindet. Eine Anmeldung zur Konferenz, die sich an Mitarbeiter von Hochschulen, Forschungseinrichtungen und Unternehmen richtet, ist bis zum 13. April möglich.
Das Programm und die Anmeldekarte der Jahreskonferenz der EU-Strukturfonds in Sachsen: http://www.strukturfonds.sachsen.de/set/431/Einladung_EU-JK_Forscher_entdecken.pdf
Die Nachwuchsforschergruppe MoLeiRo im Internet: http://www.moleiro.tu-chemnitz.de
Weitere Informationen zu MoLeiRo erteilt Dr. Holger Schlegel, Telefon 0371 531-32236, E-Mail holger.schlegel@mb.tu-chemnitz.de.
Katharina Thehos
15.04.2012




