Kleinster mikroelektronischer Roboter der Welt
In der Titelgeschichte des renommierten Fachmagazins „Nature Electronics“ präsentiert ein internationales Forschungsteam unter Federführung der TU Chemnitz ein neuartiges mikroelektronisches System
-
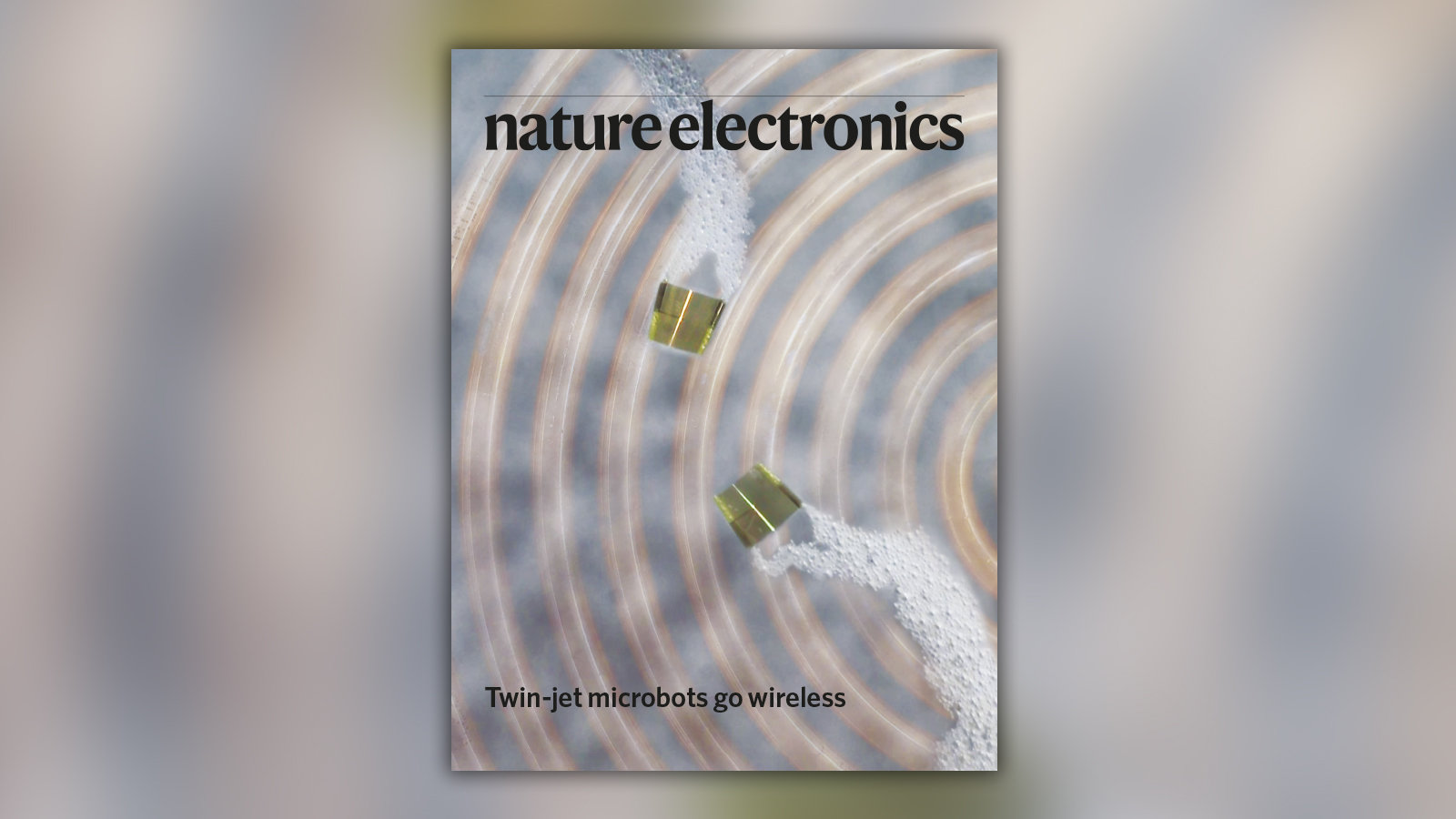
In der Titelgeschichte des renommierten Fachmagazins „Nature Electronics“ präsentiert ein internationales Forschungsteam unter Federführung der TU Chemnitz ein neuartiges mikroelektronisches System. Grafik: Nature Electronics -
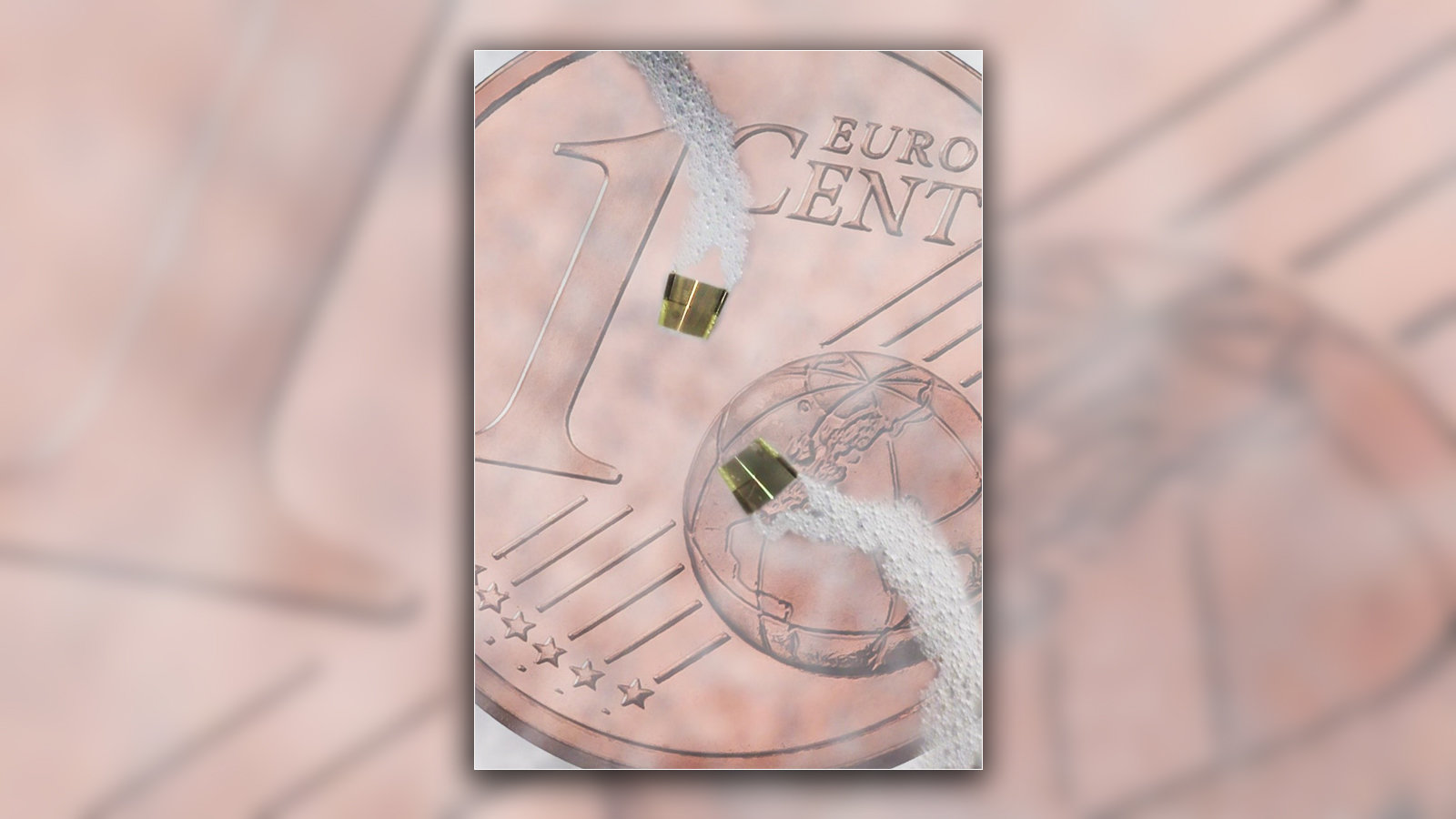
Abb. 1: Die kleinsten elektronischen Mikroroboter mit eigenem Antrieb manövrieren in einer Flüssigkeit über einer 1 Cent Euro Münze. Grafik: TU Chemnitz -
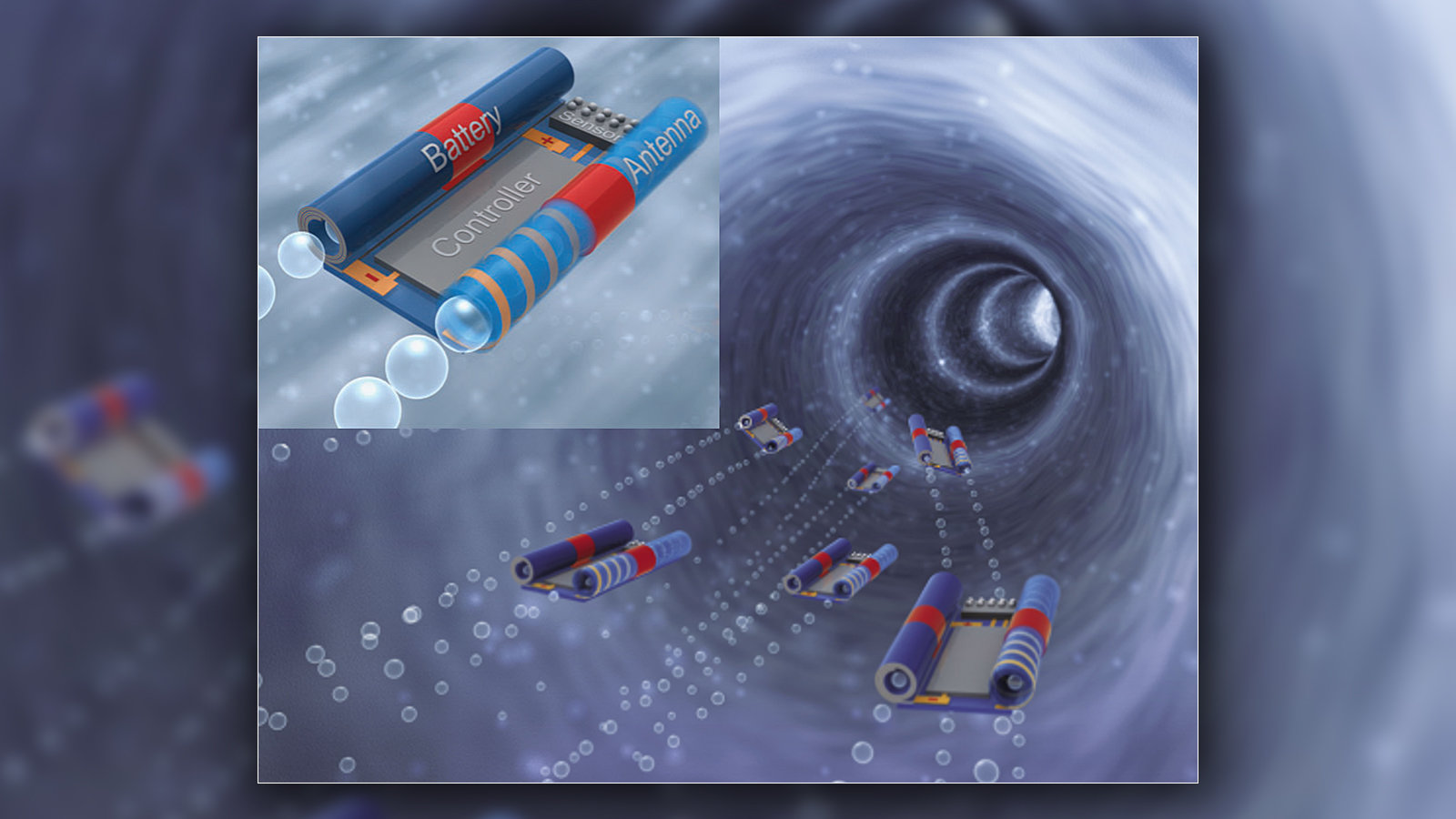
Abb. 2: Die Idee eines komplexen mikroelektronischen Systems mit eigenem Antrieb und diversen Funktionen (Energiespeicherung, Elektronik, Sensorik, Kommunikation) wurde vor neun Jahren formuliert (Aus: Chem. Soc. Rev., 40, 2109 (2011)). Grafik: Leibniz IFW Dresden -

Prof. Dr. Oliver G. Schmidt ist Pionier auf dem Gebiet der Mikrorobotik und Mikromotoren und war federführend an der Entwicklung des mikroelektronischen Roboters beteiligt. Foto: Jacob Müller
Einem internationalen Forschungsteam unter Leitung von Prof. Dr. Oliver G. Schmidt, Inhaber der Professur Materialsysteme der Nanoelektronik an der Technischen Universität Chemnitz, Initiator des Zentrums für Materialien, Architekturen und Integration von Nanomembranen (MAIN) an der TU Chemnitz und Direktor am Leibniz-Institut für Festkörper- und Werkstoffforschung (IFW) Dresden, ist ein Durchbruch gelungen. In der aktuellen Ausgabe von „Nature Electronics“ berichten sie über die Entwicklung des kleinsten mikroelektronischen Roboters der Welt, der durch einen Zwillings-Düsenjet angetrieben und gesteuert wird (Abb. 1). Der mikrolektronische Roboter ist 0.8 mm lang, 0,8 mm breit und 0.14 mm hoch. Zum Vergleich: Ein 1-Cent-Stück hat einen Durchmesser von rund 16 mm. Der Mikro-Roboter ist mechanisch extrem flexibel, beweglich und mit diversen Funktionen ausgerüstet. An dem Projekt waren neben der TU Chemnitz und dem IFW Dresden die Chinesische Akademie der Wissenschaften Changchun und die Technische Universität Dresden beteiligt.
Ein besonderer Aspekt der Entwicklung ist die Bereitstellung von elektrischer Energie an Bord, die es dem hochflexiblen Mikro-Roboter erlaubt, verschiedene Aufgaben zu erfüllen. Das System ist zudem in hohem Maße manövrierfähig in wässriger Lösung und lässt sich fernsteuern. Darüber hinaus verfügt der Roboter über eine Lichtquelle und einen kleinen Greifarm, die kabellos mit Energie versorgt werden können. Denkbar ist so der Einsatz von biomedizinischen Sensoren und Aktoren, die Anwendungen in den Bereichen der Mikro-Robotik und Medizintechnik ermöglichen. Beispiele hierfür sind das gezielte Verabreichen von Medikamenten oder die Diagnose von Krankheiten direkt im Organismus. Die Ergebnisse und Funktionsmöglichkeiten des Systems sind von so hoher Relevanz, dass sie als Titel der aktuellen Ausgabe von „Nature Electronics“ erscheinen.
Kontrolle und Steuerbarkeit erstmalig in kabellosem Mikroelektronik-Roboter umgesetzt
Das Forschungsfeld der Mikro-Roboter und Mikromotoren erzeugt seit mehr als zehn Jahren ein stark steigendes weltweites Interesse bei Wissenschaftlerinnen und Wissenschaftlern verschiedener Fachrichtungen. Insbesondere die fiktive Anwendung eines medizinischen Mini-U-Boots mit eigenem steuerbaren Antrieb beflügelt immer wieder sowohl die Grundlagen- als auch die angewandte Forschung. Dabei war das Ziel, die Entwicklung eines vollständig kontrollier- und steuerbaren mikroelektronischen Roboters, lange Zeit Science Fiction – bis jetzt. Zwar gibt es mittlerweile chemisch angetriebene Mikromotoren, die in ersten medizinischen Studien in den USA auf ihre Tauglichkeit zur Heilung bestimmter Krankheiten getestet werden, allerdings handelt es sich dabei um sehr einfache Systeme, die weder über elektrische Energie noch über mikroelektronische Einheiten an Bord verfügen. Eine gezielte Kontrolle und Steuerung der Mikroroboter ist somit nicht möglich. Das ist bei dem von Oliver G. Schmidt und seinem Team entwickelten System anders – dabei basiert es auf einer neun Jahre alten Idee.
Voll fernsteuerbarer Mikroantrieb – Neun Jahre alte Idee wird Realität
„Vor fast zehn Jahren habe ich mit meinem damaligen Team die Idee formuliert, winzige chemische Düsenantriebe mit mikroelektronischen Komponenten zu verbinden (Abb. 2, Video), um damit zwei Fachrichtungen zusammenzuführen, die bis dahin nur wenig gemeinsam hatten. Es ist wunderbar zu sehen, dass diese Idee durch die technologische Innovationskraft meines Doktoranden Vineeth Kumar Bandari und das außergewöhnliche wissenschaftliche Engagement von Dr. Feng Zhu nun in einer ersten vereinfachten Form experimentell realisiert werden konnte (Abb. 1)“, sagt Schmidt erfreut.
Die Antriebseinheit des nun vorgestellten Systems besteht aus aufgerollten Mikroröhrchen, die Schub durch den druckhaften Ausstoß von Sauerstoffbläschen erzeugen. Diesen Vorgang konnten die Forscherinnen und Forscher in einem der beiden Mikroröhrchen thermisch kontrollieren und so den Mikro-Roboter in verschiedene Richtungen steuern (Video 2).
Das komplette mikroelektronische System fertigten die Forscherinnen und Forscher aus einer Kombination aus Nano-Membranen auf Polymer-Basis an, die mit ihren Materialeigenschaften ihresgleichen sucht und in dieser Kombination eine wesentliche Rolle spielt. Die Konstruktion ist mechanisch hochflexibel und ermöglicht die Aufnahme elektronischer Komponenten und steuerbarer Aktuatoren.
Für letzteres fertigte das Team eine dünne Schicht aus einem temperaturempfindlichen Polymer und integrierte diese als Aktuator an einem Ende des mikrorobotischen Systems. Durch die justierbare lokale Erhöhung oder Verringerung der Temperatur ist es möglich, den Aktuator zu schließen und zu öffnen, um kleinste Objekte zu greifen und wieder loszulassen.
Elektrische Energie in einem Mikroroboter – Bahnbrechende Grundlagen gelegt
Da der Mikroroboter Energie braucht, aber nicht einfach an der Steckdose geladen werden kann, kommt ein System für die drahtlose Energieübertragung zum Einsatz, das aus einem externen Transmitter und einer in dem Mikrosystem integrierten Empfangsantenne besteht. Die Energie wird per Induktion übertragen – das Prinzip ist mit dem kabellosen Aufladen eines Handys vergleichbar. Es ist das erste Mal, dass die kabellose Übertragung elektrischer Energie in einem derart kleinen Mikro-Roboter genutzt werden kann.
Mit ihrer bahnbrechenden Arbeit zur Fertigung des kleinsten mikroelektronischen Roboters, der kabellos mit Energie versorgt werden kann, fernsteuerbar und voll manövrierfähig ist sowie über eine Aktorik verfügt, legen die Forscherinnen und Forscher um Prof. Dr. Oliver G. Schmidt eine wesentliche Grundlage für den zukünftigen Einsatz von autonom arbeitenden Mikrorobotern im biomedizinischen Sektor.
Da aktuell für den Antrieb unter anderem auch Wasserstoffperoxid notwendig ist, kann das System in dieser Labor-Konfiguration noch nicht direkt im menschlichen Körper eingesetzt werden. Eine Weiterentwicklung ist dafür nötig, der sich das Forschungsteam in einem nächsten Schritt widmen wird.
Zur Person:
Oliver G. Schmidt wurde 2007 als Professor für Materialsysteme der Nanoelektronik an die TU Chemnitz berufen und ist gleichzeitig Direktor des Instituts für Integrative Nanowissenschaften am Leibniz-Institut für Festkörper- und Werkstoffforschung Dresden.
Schmidt ist ein Pionier auf dem Gebiet der Mikrorobotik und Mikromotoren. Er und sein Forschungsteam bewegen sich mit ihren Arbeiten im Bereich der Nanowissenschaften zwischen den Fachgebieten Physik, Chemie, Materialwissenschaften, Elektronik und Mikrosystemtechnik. Das Anwendungspotential seiner wissenschaftlichen Erkenntnisse hat Schmidt in der Mikrorobotik, Photonik, Sensorik, Medizin und in der Energiespeicherung in zahlreichen Forschungsarbeiten aufgezeigt. 2010 erhielt er zusammen mit drei seiner damaligen Kollegen den Guinness Weltrekord für den kleinsten von Menschenhand gefertigten Düsenantrieb.
Für seine herausragenden Arbeiten zur Erforschung, Herstellung und innovativen Anwendung funktioneller Nanostrukturen wurde er 2018 mit dem Gottfried Wilhelm Leibniz-Preis – dem wichtigsten Forschungsförderpreis in Deutschland – geehrt. Schmidt ist Mitglied der Deutschen Akademie der Technikwissenschaften (acatech) und gehört zu den höchstzitierten Wissenschaftlern weltweit.
Multimedia: Ein Video-Clip veranschaulicht die technischen Möglichkeit des mikroelektronischen Roboters. Der Clip ist im YouTube-Kanal der TU Chemnitz verfügbar.
Titelbild: Nature Electronics 3/2020
Animation: Leibniz-Institut für Festkörper- und Werkstoffforschung Dresden
Real-Aufnahmen: TU Chemnitz
Publikationen
A flexible microsystem capable of controlled motion and actuation by wireless power transfer by Oliver G. Schmidt et al.: https://www.nature.com/articles/s41928-020-0384-1
Rolled-up nanotech on polymers: from basic perception to self-propelled catalytic microengines by Oliver G. Schmidt et al. [Chem. Soc. Rev. 40, 2109 (2011)]: https://doi.org/10.1039/C0CS00078G
Matthias Fejes
19.03.2020




