Technische und Organisatorische Informationen
Die Roboter
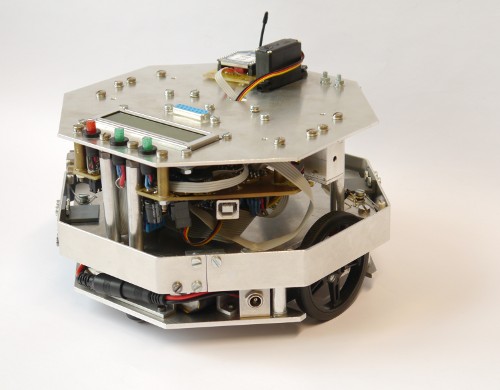
Für den Praktikumsbetrieb stehen fünf baugleiche Roboter vom Typ "TUCBot" zur Verfügung: "Andi", "Pete", "Anni", "Emmi" und "Hugo".
Nachfolgend einige technische Daten zu den Robotern:
- Höhe x Länge x Breite des Roboters: ca. 13x18x18 cm
- Spurweite ca. 15,8 cm
- Akkuspannung 7,2 V
- Betriebsdauer bis zu 5 h
- Mikrocontroller: Atmel ATmega644P
- zwei Motoren mit jeweils einem richtungssensitiven Rad-Encoder
- Motorstrom bis 2,2 A
- maximale Geschwindigkeit ca. 0,5 m/s
- Raddurchmesser 60 mm
- Inkremente pro Umdrehung 1632
- Ausgabe über LC-Display und Kommunikationschnittstelle (XBee, USB, RS232, I2C-Bus)
- Beleuchtetes LC-Dislpay 2 Zeilen mit je 16 Zeichen
- Funkmodule XBee-Pro nach IEEE 802.15.4
- Baudrate serielle Kommunikationsschnittstellen: Standard 57600
- ein mittels Servo drehbar gelagerter Infrarot-Sensor des Typs GP2Y0A21YK
- Stellbereich des Servos ca. -70 bis 70 Grad
- zwei feste Infrarot-Sensoren (60 Grad nach innen gedreht) des Typs GP2Y0A21YK
- Messbereich der Infrarot-Sensoren 90-800mm
- vier Bumper zur Kollissionserkennung
- drei 38 kHz-Infrarot-Empfänger zur Erkennung der Spielfeld-Bojen
- fünf gegen Boden gerichtete Reflexkoppler, z.B. zum erkennen der Spielfeldlinien
- ein roter und zwei grüne Taster, die gleichzeitig eine LED beinhalten
- Messen der Akkuspannung / Motorstrom möglich
Sollte die rote LED neben dem Ein-/Ausschalter leuchten, hat der Akkustrom einen Maximalwert überschritten. Ursache ist wahrscheinlich ein zu schnelles Ansteuern der Motoren
Ladegeräte
Es ist unbedingt darauf zu achten, dass nach Arbeitsende alle Bojen und Roboter ausgeschalten werden. Roboter, Akkus oder Bojen mit niedrigem Ladezustand sollen selbständig an die dafür vorgesehenen Ladegeräte angeschlossen werden. Nur so kann eine ständige Arbeitsbereitschaft der Geräte gewährleistet werden. Achten Sie auch darauf, dass Sie die Ladegeräte durch den Netzschalter ausschalten, bevor Sie das Labor verlassen.
Spielfeld und Bojen
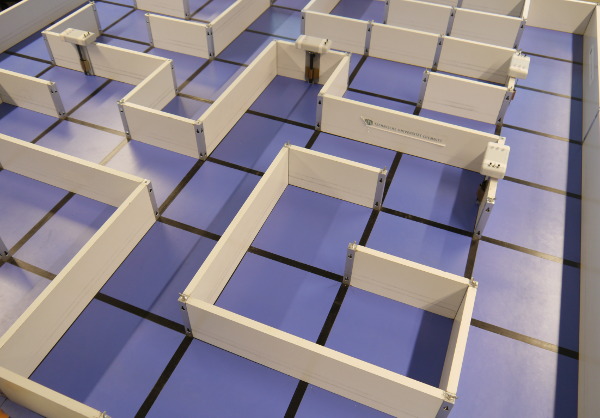

Das ca. 250x250cm große Spielfeld (Labyrinth) ist wie ein Schachbrett aufgebaut. Es besteht aus einer Grundplatte mit 8x8 Einzelfeldern und frei stellbaren, mit Winkelstücken verbundenen Wandsegmenten von n-mal 30cm Länge. Die einzelnen Parzellen sind je 30x30cm groß und zur Navigation durch schwarze Streifen von einander getrennt. Mit dem Labyrinth und seinen Wandsegementen kann während des gesammten Praktikums frei gearbeitet werden.
Als Ziele für die Roboter werden die sogenannten Bojen verwendet. Sie senden ein impulsweitenmoduliertes Infarot-Signal aus, welches die Roboter über ihren IR-Sensor empfangen und auswerten können. Ausgehend von dem Zustand neutral können die Roboter durch einfaches Gegenfahren die Bojen in die Zustände rot bzw. grün schalten. Während das Umschalten beim ersten Gegenfahren zufällig erfolgt, wechseln die Farben rot/grün bei jedem nochmaligen Betätigen hin und her. Der jeweilige Farbzustand wird dann, für den Betrachter sichtbar, durch LEDs am Bojenkopf angezeigt.
Weitere Hinweise zu den Bojen:
- zum Einschalten den Schalter nach links bewegen (Boje startet im Zustand neutral, orangefarbene LED)
- per Taster kann aktueller Ladezustand angezeigt werden (Aufleuchten aller LEDs bedeutet voll geladen)
- per Taster kann ebenfalls ein Zurücksetzen des Zustands erfolgen
- automatische Abschaltung erfolgt entweder nach 30 Minuten Inaktivität oder bei Tiefentladung
- Ladebuchse befindet sich an der Unterseite des Bojenkopfes




