Unsere Roboter von 2000 bis Heute
Auf dieser Zeitleiste sieht man die verschiedenen Roboter, mit denen wir seit dem Jahr 2000 gearbeitet haben. Dabei können drei Kategorien unterschieden werden:
- Mobile Roboter am Boden, die besonders geeignet sind für den Einsatz im Außenbereich in unstrukturierten, unebenen (3D) Umgebungen. Dazu gehören unsere neuesten Roboter für den SpaceBot Cup, aber auch unsere älteren Roboter (Hans, Franz und RoboCar).
- Autonome Flugroboter (Unmanned Aerial Systems). Vor 2007, als noch keine Quadrocopter (Micro Aerial Vehicles - MAV) gab, haben wir mit einem autonomen Luftschiff (Blimp) gearbeitet, das Rettungskräfte im Katastrophenfall (Großbrand, Flut) mit Sensorinformationen aus der Luft unterstützen sollte. Unsere späteren Arbeiten mit Quadrocoptern konzentrierten sich auf das autonome Fliegen in Innenräumen (kein GPS/GNSS, Echtzeitnavigation mit Hindernisvermeidung).
- Kleine Roboter (ca. 30 cm) für die Lehre zur mobilen Robotik. Unser Projektpraktikum Mobile Roboter ist ein Wettbewerb, bei dem die Roboter in einem unbekannten Labyrinth (2x2 Meter) navigieren und Leuchtbojen finden und umschalten müssen.
Die mechanischen Plattformen für die Roboter wurden in den meisten Fällen nicht selbst entworfen, sondern eingekauft. Trotzdem war ein erheblicher Aufwand und viel Erfahrung notwendig, um die Plattformen für die gewünschte Anwendung mit diversen Sensoren, Aktuatoren und Rechentechnik auszustatten und zu erweitern.

2019
Im Rahmen der Lehrveranstaltung "Projektpraktikum Autonome Systeme" werden aktuelle Fragestellungen an einem autoähnlichen Modell-Roboter untersucht. Dafür wurden die Fahrzeuge "TUCar" an der Professur entwickelt. Sie sind mit Odometrie-Sensorik sowie einer Fischaugen-Kamera mit 200° Öffnungswinkel ausgestattet.
2017
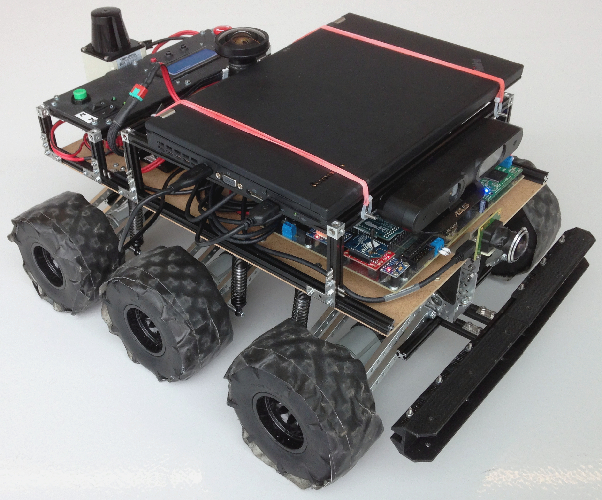
Zusätzlich zu unseren zwei großen Robotern wollten wir einen kleinen sehr agilen Roboter für schnelles explorieren in unwegsamen Gelände einsetzen. Deshalb bauten wir diesen "Scoutroboter" auf Basis der 6WD Mantis Plattform von Servocity. Derzeit wird er zum Testen verschiedener Sensoren (z.B. Intel RealSense) und für studentische Arbeiten eingesetzt.
2015
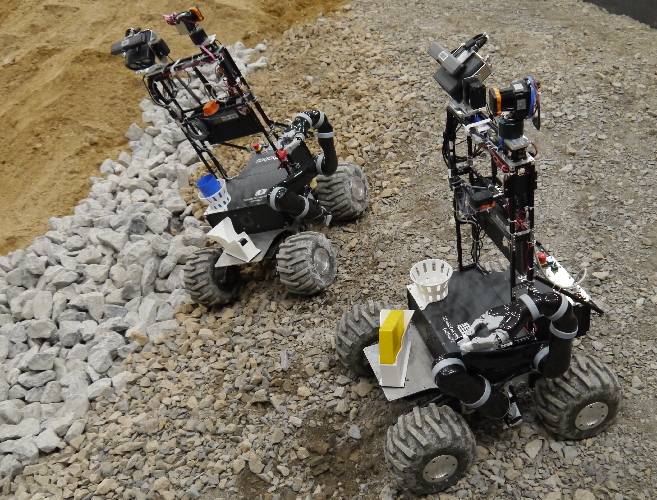
Für den zweiten SpaceBot Cup, der 2015 stattfand, haben wir unsere beiden Roboter komplett überarbeitet: mit neuen Sensoren (MultiSense S7 stereo Kamera von Carnegie Robotics, rotierender Hokuyo Laser für 3D-Scans) und einem neuen Roboterarm (Kinova Mico). Weitere Details sind auf unerer Projektseite und in diesem Paper (Lange16) zu finden.
2013
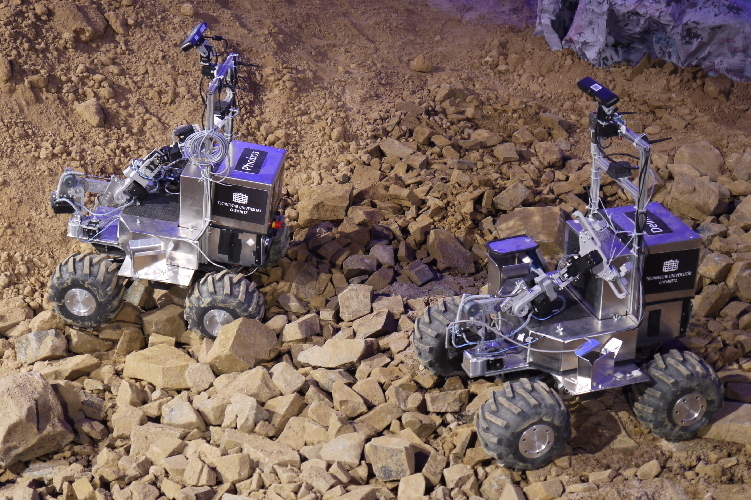
In dem Jahr fand der erste SpaceBot Cup, organisiert vom deutschen Zentrum für Luft- und Raumfahrt DLR, statt. Das war eine perfekte Aufgabe für uns, um unsere Ideen aus der Forschung umzusetzen und in einer herausfordernden Umgebung zu testen. Wir setzten ein Team von zwei identischen Robotern, basierend auf der Plattform Summit XL von Robotnik und einem selbst konstruierten Armen, ein. Details zum SpaceBot Cup 2013 und zu unseren Robotern sind in diesem Paper (Sünderhauf14) zu finden.
2012
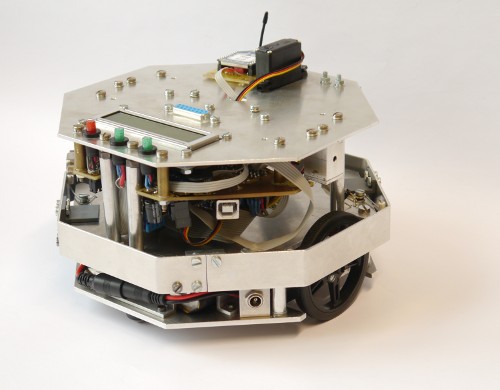
Sechs Jahre nach der zweiten Generation von Labyrinth-Robotern bauten wir eine Flotte von "TUC-Bots" für unsere beliebte Lehrveranstaltung. Diese Roboter sind modular aufgebaut und besitzen zwei ATmega644P Mikorcontroller und verschiedene Sensoren zur Bewegungsschätzung und Hindernisvermeidung. Details zu den Robotern und den Aufgaben in der Lehrveranstaltung sind in diesen Paper (Lange17) zu finden.
2010
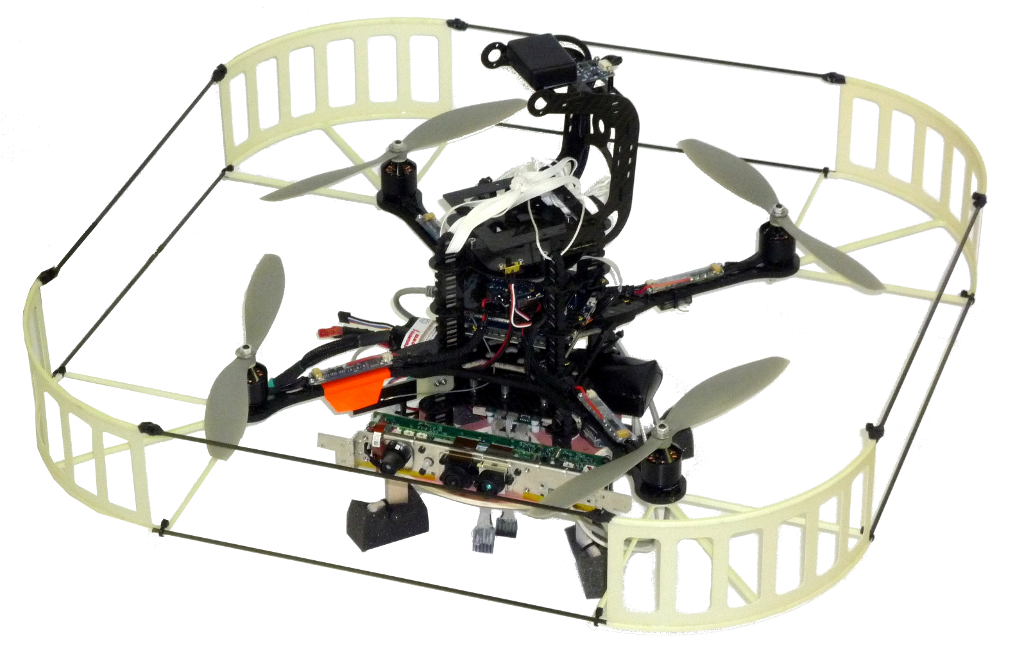
Der Pelican Quadrocopter ist der große Bruder der Hummingbirds. Bei gleicher Flugsteuerung bietet er 500g Nutzlast. Zusätzlich ist er bereits mit einem 1,6 GHz Intel Atom PC ausgestattet. Durch die hohe maximale Nutzlast kann das System auch schwerere Sensoren wie RGB-D-Sensoren (z.B. Kinect) oder 2D-Laserscanner tragen.

2009
Die zweite Generation unseres autonomen Luftschiffprojektes führte zu einem Luftschiff mit einer Länge von 11 Metern und einem Durchmesser von 3 Metern. Es kann eine Stunde mit einer Nutzlast von 5 kg fliegen. Die Anwendung war die Sensordatenerfassung in Notsituationen wie großen Überschwemmungen oder Bränden.
2008
Mit einer maximalen Nutzlast von 150kg und einer Größe ähnlich einem Golfcar ist der RobuCar TT von RoboSoft unser größter mobiler Roboter. Dieser Roboter eignet sich besonders für den Außenbereich, wo er durch seine Geländegängigkeit und seine hohe Nutzlast andere Roboter übertrifft.


2007
Der Beginn des Dronenzeitalters! Wir kauften drei Hummingbird Quadrocopter von Ascending Technologies. Diese Drohnen waren bereits mit einer Geschwindigkeit von bis zu 50 km/h sehr leistungsstark. Ein Problem gegenüber dem Zeppelin ist die Nutzlast von nur 200g und eine Flugzeit von maximal 15 Minuten.
2006
Nach fünf Jahren Betrieb haben wir die erste Generation der Labyrintroboter ausgemustert und die zweite Generation in betrieb genommen. Die Roboter sind eine Sonderanfertigung nach unseren Wünschen.


2006
Das Luftschiff der ersten Generation für unser autonomes Luftschiff Projekt. Das war bevor Quadrokopter verfügbar waren.
2005
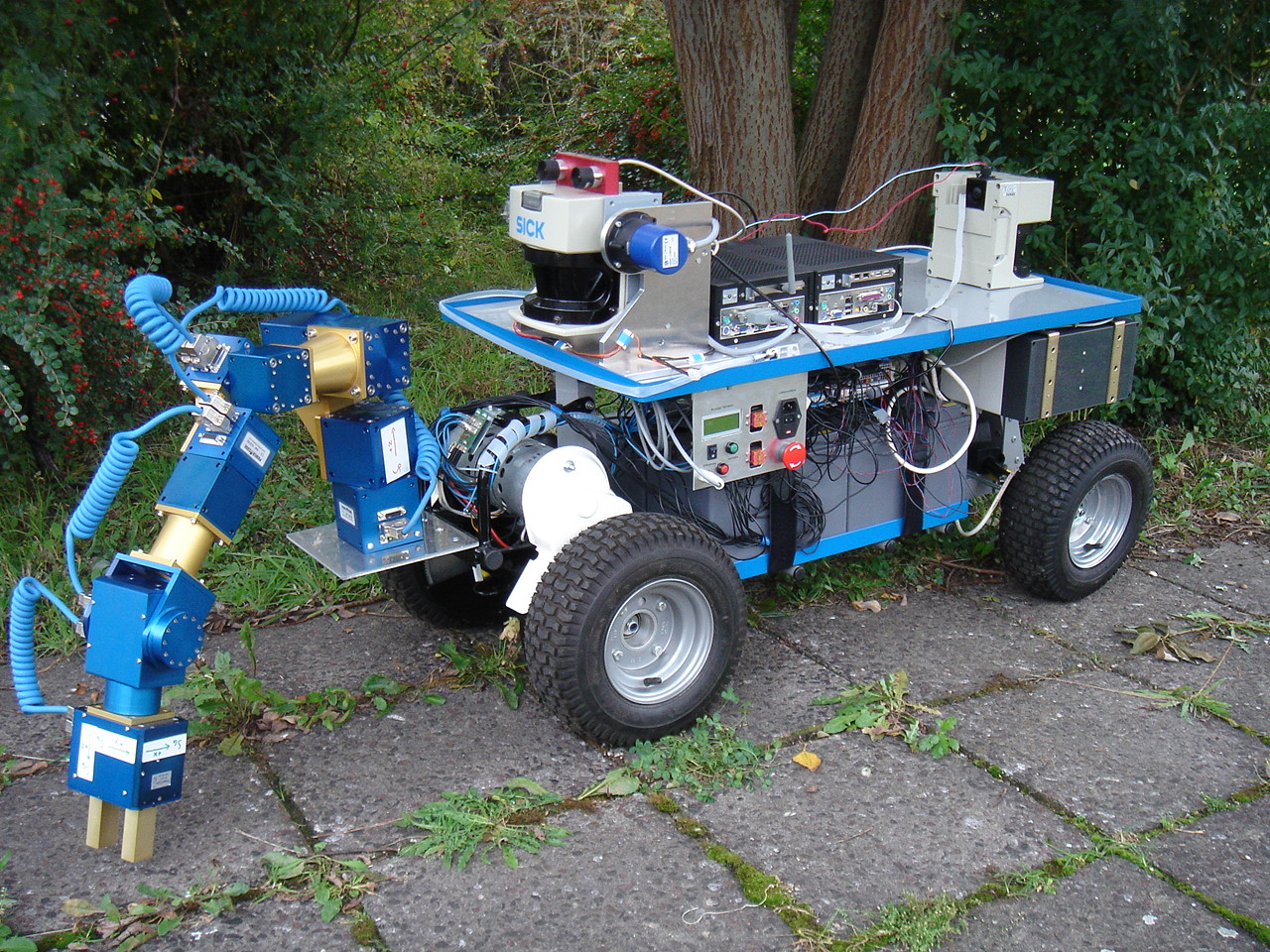
Unser zweiter Roboter ("Franz") wurde als Forschungsplattform für mobile Manipulation entwickelt. Er besitzt eine Ackermann Lenkung und ist mit einem Arm von Amtec mit sieben PowerCube Modulen ausgestattet.
2001
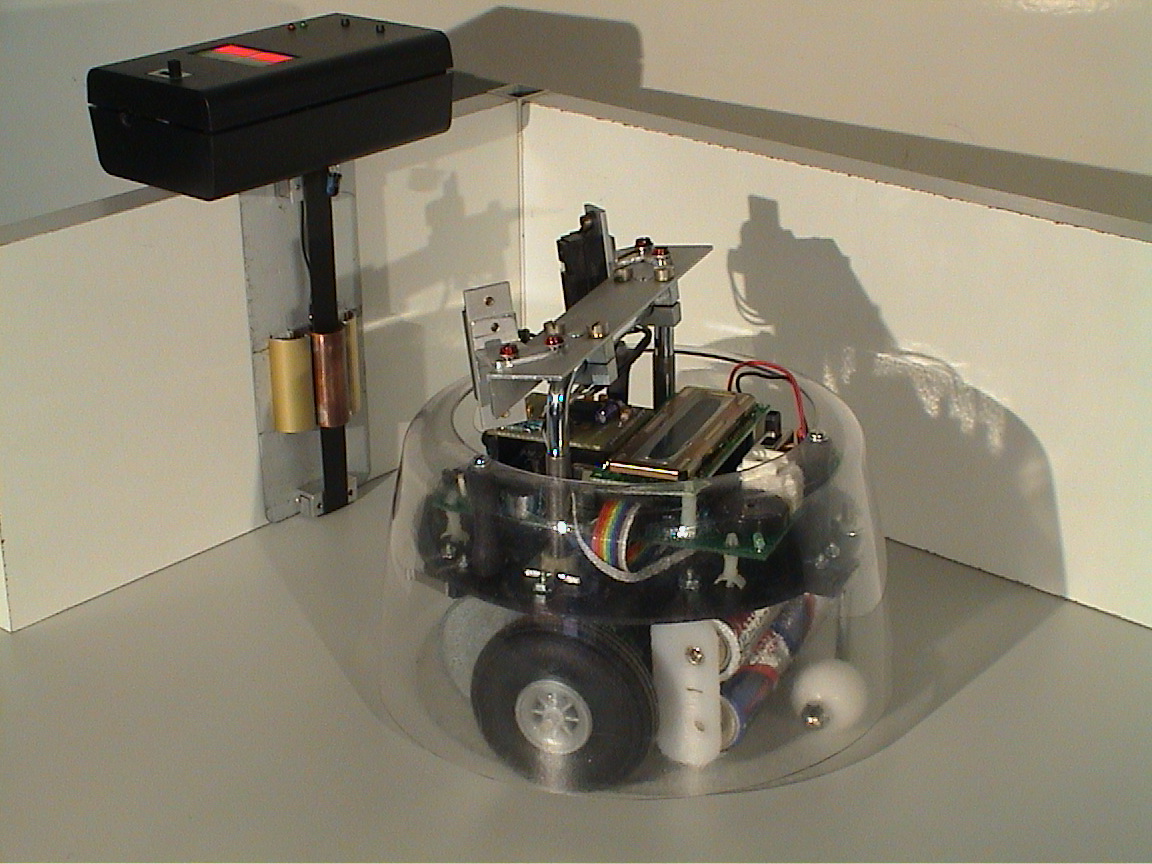
Die erste Generation unserer kleinen Roboter für unser mobile Roboter Lehrveranstaltung ist da. Die Roboter müssen durch ein unbekanntes Labyrinth navigieren, Leuchtbojen finden und einschalten. Das Praktikum ist bis heute sehr beliebt.
2000
Unser erster Roboter (Spitzname "Hans") ist ein Pioneer 2 AT von ActivMedia Robotics. Mit seinem Differentialantrieb ist er sowohl für den Innen- als auch für den Außenbereich geeignet. Wir haben ihn mit einem SICK-Laserscanner und einer Kamera auf einer Schwenk-Neige-Einheit ausgestattet. Er ist immer noch in Betrieb und wird von Studenten in Praktika verwendet.
