RopeRobot - großskalige Seilrobotik für die automatisierte Pflege urbaner vertikaler Gärten


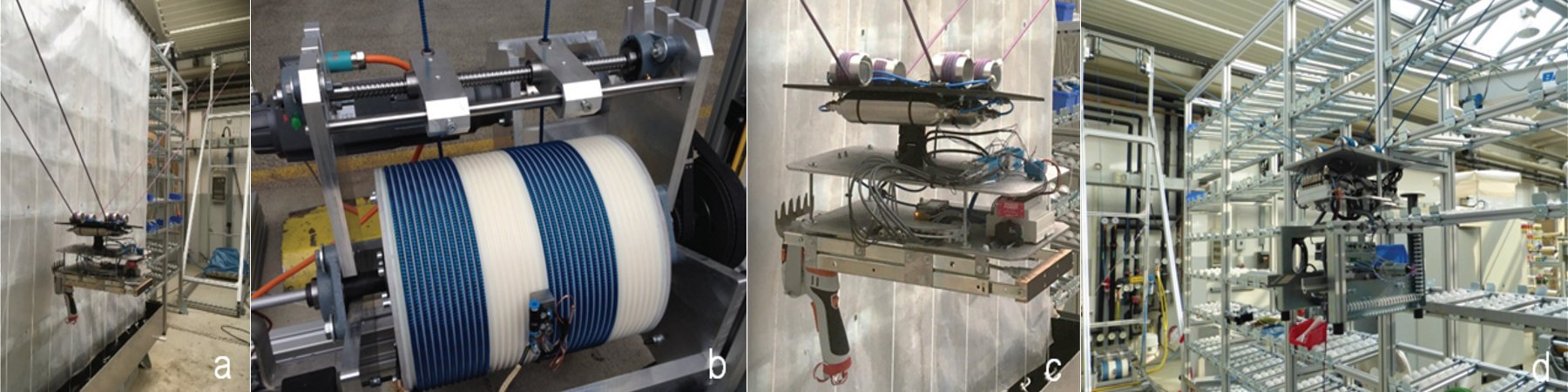
In den zurückliegenden Jahren wurde an der Technischen Universität Chemnitz das Konzept eines nichtredundant abgespannten Seilroboters für großskalige Anwendungen erarbeitet (Bild 3). Dafür wurde ein medienführendes hochfestes Faserseil entwickelt (Tabelle 1). Dieses Seil ermöglicht den Transport von elektrischer Energie, Steuersignalen und die Fluidförderung zwischen den Antrieben des Systems und der jeweiligen Aktorik am Endeffektor.
Die entwickelten Faserseile wurden erfolgreich in einem Demonstrator getestet, wobei bisher benötigte Schleppleitungen vollständig entfallen können. Somit sind hochdynamische Anwendungen möglich. Geometrische Störungen, hervorgerufen durch Kollisionen der Schleppleitungen im Arbeitsraum, entfallen.
Seilkinematiken sind dadurch flexibler und in größeren Anwendungsbereichen einsetzbar als konventionelle eigenkinematische Handhabungssysteme. Der Nachweis der Funktion wurde mittels mehrerer verschiedener Endeffektoren auf Systemebene erbracht. Es wurden Endeffektoren für die Pflege von vertikalen Begrünungen (Bilder 3a und 3c) sowie für das Kommissionieren an Durchlaufregalsystemen (Bild 3d) entwickelt und erfolgreich im Labormaßstab getestet. Weiterhin wurden Systemkomponenten wie die Antriebe mit Medieneinspeisung und Mediensplittern so wie das medienführende Seil selbst entwickelt und umfangreich getestet.
Das System kann sowohl im Innen- als auch im Außenbereich eingesetzt werden (Bild 2). Es eignet sich für Arbeitsbreitenn von 5 bis ca. 100 m, ohne dabei Antriebe oder Aktorik am Endeffektor verändern zu müssen. Es sind ebene und räumliche Anwendungen vorstellbar.
| Anforderung | Zielgröße |
|---|---|
| Wiederholbare Positioniergenauigkeit aller Bewegungsachsen | + / - 0,5 cm |
| Arbeitsraum (L x B x H) | 20 x 20 x 5 m |
| Nutzlast der Aktorikplattform | 20 kg |
| Achsgeschwindigkeiten / Achsbeschleunigungen | bis zu 5 m/s / bis zu 10 m/s² |
| Anliegende Medien über medienführendes Seil I | 0,5 l/min (Wasser RT) |
| Anliegende Medien über medienführendes Seil II | 100 l/min (Druckluft bei 6 bar) |
| Anliegende Medien über medienführendes Seil III | 48 V / 3,5 A (elektrische Energieversorgung) |
| Anliegende Medien über medienführendes Seil I&II&III | Ethernet (Übertragung der Steuerungssignale) |
Projektteam
Laufzeit01.05.2021 bis 31.10.2022 |
Gefördert durch

pdf-Version |