Der Automotive-Demonstrator "YellowCar"

Im Rahmen der Forschungsarbeiten der Professur Technische Informatik wird das YellowCar entwickelt. Das YellowCar ist ein Demonstrator für den Bereich des Automotive Software Engineerings. Durch miteinander vernetzte Steuergeräte werden verschiedene einfache Fahrzeugfunktionen realisiert. Der Schwerpunkt liegt nicht auf der eigentlichen Funktion sondern auf der Softwarearchitektur. Am YellowCar können reale Softwarearchitekturen untersucht und getestet werden. Studierende erhalten so die Möglichkeit, Softwareentwicklung für den Automobilbereich selbst zu erleben.
Die wichtigsten technischen Punkte des YellowCars:
- Controller: drei mit einem CAN-Bus vernetzte Steuergeräte
- Systemarchitektur: AUTOSAR
- Funktion: automatisierte Fortbewegung
- Fernsteuerung
Entwicklung
Für die Entwicklung des YellowCars dient ein Elektro-Kinderauto als Basis und wurde mit Steuergeräte-Elektronik ausgerüstet. Folgende Entwicklungen wurden vorgenommen:
- Integration leistungsstarker Batterie
- Verbesserung der Traktion
- Erweiterung/Verbesserung der Beleuchtung (Abblendlicht, Rücklicht, Blinker)
- Abstandssensoren vorne/hinten (Ultraschall)
- Licht und Temperatursensor
- Raddrehzahlsensor (Geschwindkeitsanzeige auf Motorhaube)
- Installation von drei Steuergeräten mit CAN-Bus-Vernetzung
- Server unter dem Sitz - für OnBoard-Diagnose und Fernsteuerung
Aufbau
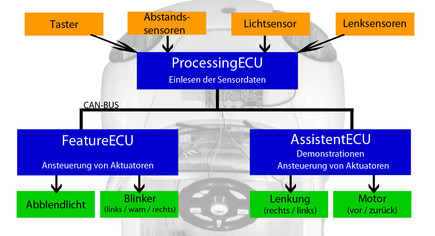
Das YellowCar besteht aus drei Steuergeräten (ECU: Electronic Conttrol Unit) vom Typ Freescale S12XEP100, die mit einem CAN-Bus (125 kBit/s) verbunden sind. Jedes der drei Steuergeräte hat eine klar definierte Aufgabe. Die ProcessingECU ist für das Einlesen von Sensorwerten zuständig und verteilt diese an die FeatureECU und die AssistantECU. Die FeatureECU dient der Steuerung der Blinker und des Abblendlichts. Die AssistantECU ist für die Durchführung der Demonstrationsabläufe zuständig und steuert die Motoren für Lenkung und Antrieb.
Systemarchitektur
Alle drei Steuergeräte sind auf Grundlage von AUTOSAR 2.1 programmiert. An der Professur für Technische Informatik steht für die Entwicklung und den Test von AUTOSAR-Steuergeräten eine vollständige AUTOSAR Toolkette zur Verfügung.

Die Applikationsentwicklung wird mit Hilfe von SystemDesk von der Firma dSpace vorgenommen. Grundlegende Tests der eigentlichen Applikation können ebenfalls in SystemDesk vorgenommen werden. Im tresos Studio von der Firma Elektrobit werden alle für die Applikation notwendigen Basissoftwaremodule konfiguriert und danach die AUTOSAR Runtime Environment (RTE) generiert, welche als Kommunikationsschicht dient. Die daraus resultierenden C-Dateien werden mit dem Freescale Codewarrior kompiliert.
Ein Hardware-in-the-Loop Test wird durch das Werkzeug ECU-TEST von der Firma TraceTronic ermöglicht.
Demonstration
Um die Funktionstüchtigkeit des YellowCars zu zeigen, wurden neben einer Fernsteuerung verschiedene Demonstrationen implementiert. Die Demonstrationen können durch Knöpfe auf der Motorhaube gestartet werden. Folgende Demonstrationen sind aktuell implementiert:
- Ansteuerung unterschiedlicher Lichter (Blinker, Abblendlicht, Ambient-Light)
- Vorwärtsfahren bis ein Hindernis erkannt wird
- Kreisdemo - Lenkrad links einschlagen, danach fahren bis Hindernis erkannt wird
- Kreisdemo - Lenkrad links einschlagen, danach fahren bis Hindernis erkannt wird, Stoppen, Ausweichen durch Lenkradeinschlag, kurzes Rückwärts fahren, Links einlenken, Vorwärtsfahren
Fernsteuerung
Das YellowCar lässt sich durch verschiedene externe Geräte mit einer WLAN Verbindung fernsteuern. Es wurden Applikationen für Android und iOS geschrieben. Weitherhin kann die Fernsteuerung durch eine Webseite getätigt werden. Das YellowCar kann immer nur von genau einem Endgerät gesteuert werden. Um die Fernsteuerung nutzen zu können, ist ein Login auf dem Server des YellowCars mit Nutzername und Password notwendig. Ein Login mehrerer Nutzer gleichzeitig kann ausgeschlossen werden. Die Fernsteuerung hat die höchste Priorität in der Steuerung. Das heißt Demonstrationen können dadurch unterbrochen werden.
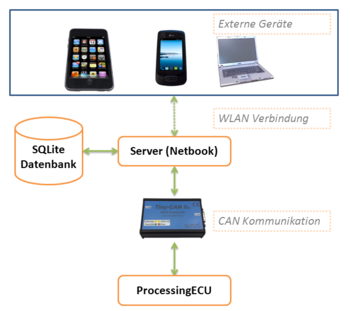
Neben der Fernsteuerung wird der Server auch für das Monitoring der Busnachrichten in der Entwicklung verwendet. Ein Teil der Sensordaten (Abstand, Geschwindigkeit, Helligkeit,...) des Fahrzeugs werden and die externen Geräte übertragen und angezeigt
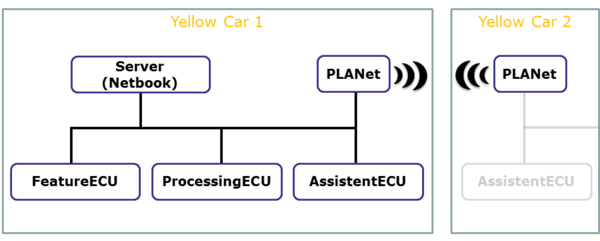
Car2Car Kommunikation
Zwei YellowCars wurden jeweils mit der Plattform PLANeT ausgestattet. Mit Hilfe dieser Plattform wurde ein Ausweichszenario implementiert. Dabei kommuniziert ein Fahrzeug mit dem anderen und signalisiert, dass auf Grund einer Gefahrenbremsung ein Ausweichmanöver eingeleitet werden soll. Darüber hinaus werden die Warnblinker des Fahrzeugs aktiviert. Das PLANet ist direkt an den CAN-Bus des Fahrzeugs angeschlossen und sendet der ProcessingECU Informationen. Die ProcessingECU wertet diese Informationen aus und löst die notwendigen Aktionen für das Yellow Car aus.