Automatische Rekonfigurierung von Schnittstellen für eingebettete Systeme
Forschungsprojekt, gefördert durch die DFG
1. Eingebettete Systeme
Technische Systeme, die über computergestützte Steuerungen und Regelungen verfügen, werden als Eingebettete Systeme bezeichnet. Die Anwendungsvielfalt im Alltag ist nahezu unerschöpflich. Einige Beispiele sind elektronisch gesteuerte Waschautomaten, Kfz-Steuerungen für Komfort (Klimaanlage, Fensterheber, Innenbeleuchtung) und für den Motor (Beschleunigungskontrolle, ABS, EPS) sowie Flugzeugsteuerungen und natürlich auch die allgegenwärtigen Handys der Kommunikationsbranche.
1.1 Rekonfigurierung
Die Anforderungen an eingebettete Systeme werden immer vielfältiger. Dies resultiert aus der sich ständig erweiternden Liste möglicher Funktionen sowie aus immer höheren Anforderungen, z.B. die vollständige Motorsteuerung bei Höchstgeschwindigkeiten. Aus Kosten- und Platzgründen können jedoch nicht alle gewünschten Funktionen gleichzeitig realisiert werden. Dieses Problem kann durch Rekonfigurierung gelöst werden, d.h. man teilt das Gesamtsystem in Teile ein, die zu unterschiedlichen Zeitpunkten aktiviert werden. Beispielsweise ist die Umschaltung zwischen verschiedenen Frequenzbändern bei Handys bereits heute gängige Praxis. Man benötigt aber die Möglichkeit zwischen Funktionen zu wechseln, die sich in ihrer Art nicht so sehr ähneln wie zwei Frequenzbänder. Derartige Wechsel waren bisher nicht möglich, da sehr unterschiedliche Funktionen sehr unterschiedliche Kommunikationsverbindungen benötigen.

1.2 Demonstration
Die Rekonfigurierung von Schnittstellen für eingebettete Systeme wird an einem klassischen eingebetteten System, einer Roboter-Steuerung, in drei Schritten demonstriert:
- Eine Ansteueraufgabe wird dem Roboter zugeteilt. Dieser führt die Aufgabe aus und benutzt dazu nur drei der sechs verfügbaren Motoren. Das System für diese Aufgabe ist so ausgelegt, dass nur drei Motoren angesteuert werden können.
- Im zweiten Schritt wird dem Roboter eine neue Aufgabe zugeteilt, die jedoch fünf Motoren ansteuert. Diese neue Aufgabe entspricht einer neuen Konfiguration der Roboter-Anwendung. Der Roboter startet, aber die Aufgabe wird nicht korrekt ausgeführt, da die Schnittstelle zwischen Roboter-Anwendung und Roboter nicht rekonfiguriert wurde.
- Nun wird die Rekonfigurierung der Schnittstelle angestoßen und automatisch ausgeführt. Anschließend wird die Roboter-Anwendung noch einmal gestartet und vom Roboter korrekt ausgeführt.
2. Lösungsansatz

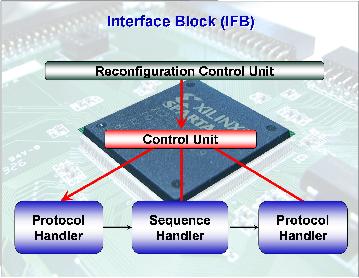
Die demonstrierte Lösung wurde erreicht, indem für die Realisierung der Schnittstelle eine Modularisierung vorgenommen wurde. Die Schnittstelle besteht aus drei Grundmodulen für
- die Behandlung des Eingabe-Protokolls,
- die Sequentialisierung der Daten für die Ausgabe und
- die Behandlung des Ausgabe-Protokolls.
Diese Modularisierung wurde von der Professur für Technische Informatik der TU-Chemnitz entwickelt. Bisherige Lösungen verzichten auf die Modularisierung und kommen zu komplexen Speziallösungen. Die Nachteile der klassischen Lösungen sind einerseits die Komplexität und anderseits die feste, nicht veränderbare Implementierung.
Der Ansatz der TU-Chemnitz hingegen ermöglicht die einfache und automatische Rekonfigurierung von Schnittstellen. Die Idee ist einfach nachzuvollziehen. Ändert sich eine Seite der Kommunikationsstrecke, ändert sich im Extremfall das Übertragungsprotokoll und die Datenmenge. Dies kann einerseits das Modul für die Behandlung des Eingabe-Protokolls betreffen, als auch das Modul zur Sequentialisierung der Daten für die Ausgabe. Die betroffenen Module werden für den Rekonfigurierungsprozess austauschbar gestaltet. Für die automatische Rekonfigurierung wurde ein zusätzliches neues Modul entwickelt und integriert. Die technische Realisierung basiert auf FPGA-Bausteinen, die zur Laufzeit der Anwendung rekonfiguriert werden können.
Die Entwicklung dieses Lösungsansatzes wurde durch die Deutsche Forschungsgesellschaft (DFG) im Rahmen des Schwerpunktprogramms Rekonfigurierbare Rechensysteme gefördert. An den Arbeiten waren wissenschaftliche Mitarbeiter und Studenten beteiligt.
Weitere Arbeiten konzentrieren sich auf die Einbeziehung von Echtzeitaspekten sowie die Verkürzung der Rekonfigurierungszeiten, z.B. durch den Einsatz zusätzlicher Speicherbausteine.
3. Fazit
Das Exponat "Automatische Rekonfigurierung von Schnittstellen für eingebettete Systeme" demonstriert die Forschungsarbeit der Professur Technische Informatik der TU-Chemnitz unter Leitung von Prof. Dr. Wolfram Hardt. Es wurde ein neuartiger Ansatz zur Rekonfigurierung von Kommunikationswegen entwickelt. Der Ansatz wurde implementiert und findet breite Anwendung im Bereich eingebetteter Systeme, vom Handy bis zum Industrieroboter.




