Bewegungsgenerierung und Pfadplanung
Teammitglieder: Thomas Kronfeld und Christian Rau
Mitarbeiter an der Professur graphische Datenverarbeitung
EinleitungDie hier erzeugten kinematischen Bewegungen sind einerseits notwendig zur ergonomischen und emotionalen Bewertung einer Handlung. Andererseits dienen diese Bewegungen der Visualisierung von Werkertätigkeiten für den Nutzer. Da eine händische Animation virtueller Charaktere (durch manuelle Einstellung der einzelnen Gelenkwinkel) sehr zeitaufwendig und fehleranfällig ist, wird im vorliegenden Projekt für jede Aktion des virtuellen Werkers vollautomatisch eine entsprechende kinematische Bewegung generiert. Möglichst realitätsnahe Bewegungen werden durch die Verwendung realer Bewegungsdaten garantiert. Diese werden unter Zuhilfenahme der Umweltinformationen und Rückmeldungen der Ergonomie- und Emotionsmodule auf die jeweilige Situation angepasst. Dabei wird zwischen Laufbewegungen und am Ort durchgeführten Verrichtungsbewegungen unterschieden. |
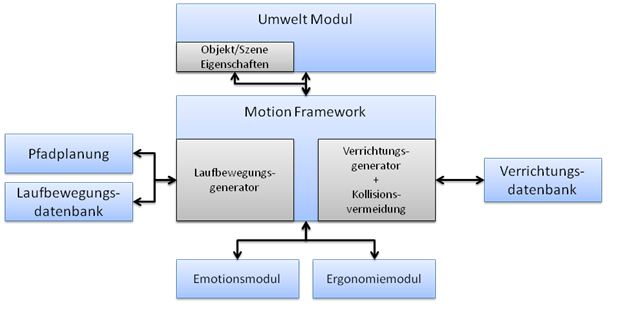
Abb. 1: Schematische Darstellung des Bewegungsgenerators und der beteiligten Kommunikationspartner (Darstellung: Thomas Kronfeld). |
Laufbewegung
Für die Generierung einer Laufbewegung benötigt man zunächst einen geometrischen Pfad entlang dessen sich der virtuelle Werker bewegt. Dieser wird in einem ersten Schritt automatisch auf Basis des Start- und Zielpunktes generiert, wobei sowohl auf ein möglichst kurze Laufwege als auch die Vermeidung von Kollisionen mit Objekten der Umwelt oder störenden Umwelteinflüssen (z.B.: Lärm- und Hitzequellen) zu achten ist. Die Laufbewegung des Werkers setzt sich schließlich aus einzelnen Laufschritten entlang eines geometrischen Pfades zusammen. Die Art und Weise dieser Modellierung ermöglicht ein einfaches Austauschen bzw. Anpassen der Schrittcharakteristik. Mit Hilfe der bereitgestellten ergonomischen und emotionalen Werte (vgl. entsprechende Module) lassen sich somit Erschöpfung und Beanspruchung direkt durch Anpassung der Bewegung selbst visualisieren. Die Grundlage für die Anpassung bilden bewegungs- und arbeitswissenschaftliche Untersuchungsergebnisse. Ziel ist es, dem Planer beim Blick auf die Szene einen intuitiven Eindruck über die aktuelle und kumulative Beanspruchung jedes Werkers zu ermöglichen.
|
|
|
|
| Abb. 2: (a) Berechnung der Laufbewegung des Werkers innerhalb einer gegebenen digitalen Fabrik. (b) Hierfür wird zunächst ein kollisionsfreier Pfad berechnet. (c) Entlang diesen der Werker bewegt wird (c) (Darstellung: Thomas Kronfeld). | ||
 (a)
(a)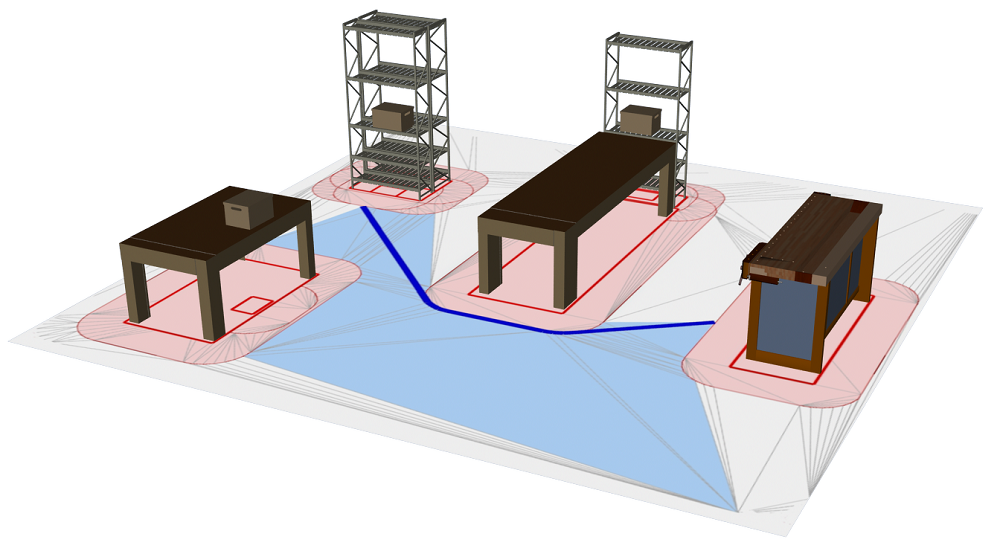 (b)
(b)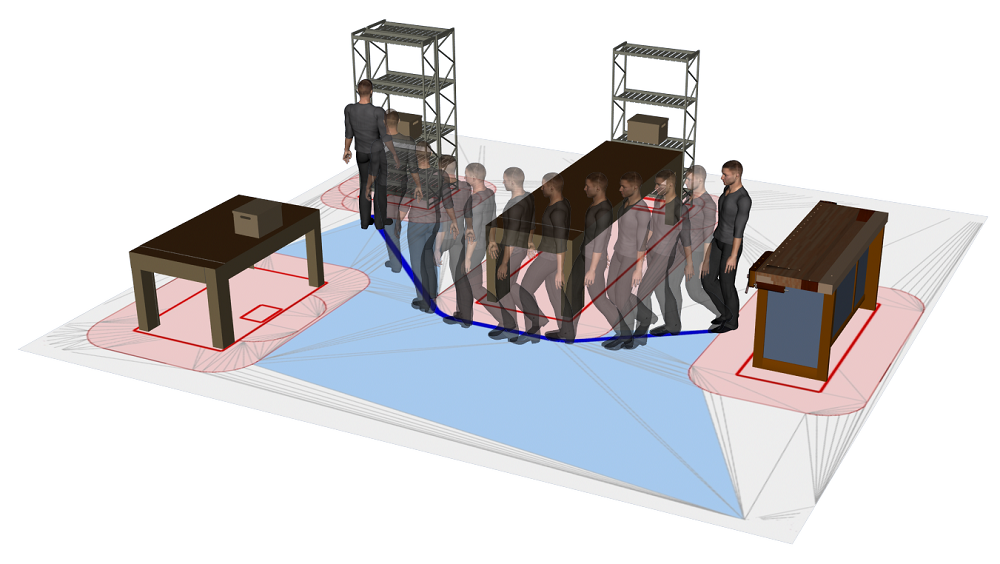 (c)
(c)Verrichtungsbewegung
Die Simulation von Verrichtungen, wie auch die Simulation von Laufbewegungen, erfolgt auf Basis von Motion-Capture-Daten. Es ist jedoch nicht möglich jede denkbare Verrichtungsausführung aufzuzeichnen.
Dies ist auch nicht nötig, da durch das hier entwickelte neuartige Motion-Blending Verfahren nicht aufgezeichnete Bewegungen einfach und biomechanisch valide generiert werden können. So lassen sich mit Hilfe des Verfahrens komplette Verrichtungen in Form von Bewegungsräumen (Motion Spaces) beschreiben. Einzelne Ausführungen entsprechen dann Parametern einer mathematischen Beschreibung. Die notwendigen Parameter (z.B. Nagelposition) können meist durch Untersuchung der Umgebung automatisch berechnet werden.
|
|
|
| Abb. 3: Einschlagen eines Nagels in eine Kugel in (a) Kopfhöhe und in (b) Brusthöhe (Darstellung: Thomas Kronfeld) | |
 (a)
(a) (b)
(b)




