Themen für studentische Abschlussarbeiten
Sie suchen ein forschungsnahes, interessantes Thema für Ihre Abschlussarbeit? Ansprechpartner für alle weiteren Informationen ist Dr.-Ing. Sven Lange.
Wir unterstützen auch gern Studenten anderer Fakultäten, die eines unserer Themen bearbeiten möchten.
Wir haben ständig interessante Aufgaben aus unseren Forschungsprojekten oder unserem Forschungsbereich (en) zu vergeben, auch über die hier vorgestellten Themen hinaus. Sprechen Sie uns einfach an!
Masterarbeiten (Auswahl)
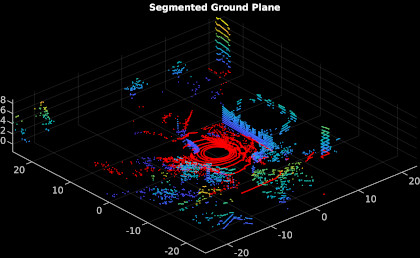
LiDAR als virtuelle Odometrie mit Unsicherheitsschätzung
Ein wichtiger Aspekt bei der autonomen mobilen Robotik ist die Zustandsschätzung. Typischerweise tragen unterschiedliche Sensoren dazu bei. Auf unserer mobilen Roboterplattform verwenden wir u.a. einen LiDAR Sensor mit mehreren Scan-Ebenen zur 3D-Wahrnehmung. Im Rahmen der anzufertigenden Abschlussarbeit sollen die Sensordaten für eine Bewegungsschätzung verwendet werden. Ein Schwerpunkt liegt dabei im Ermitteln der Zuverlässigkeit der eigentlichen Bewegungsschätzung...
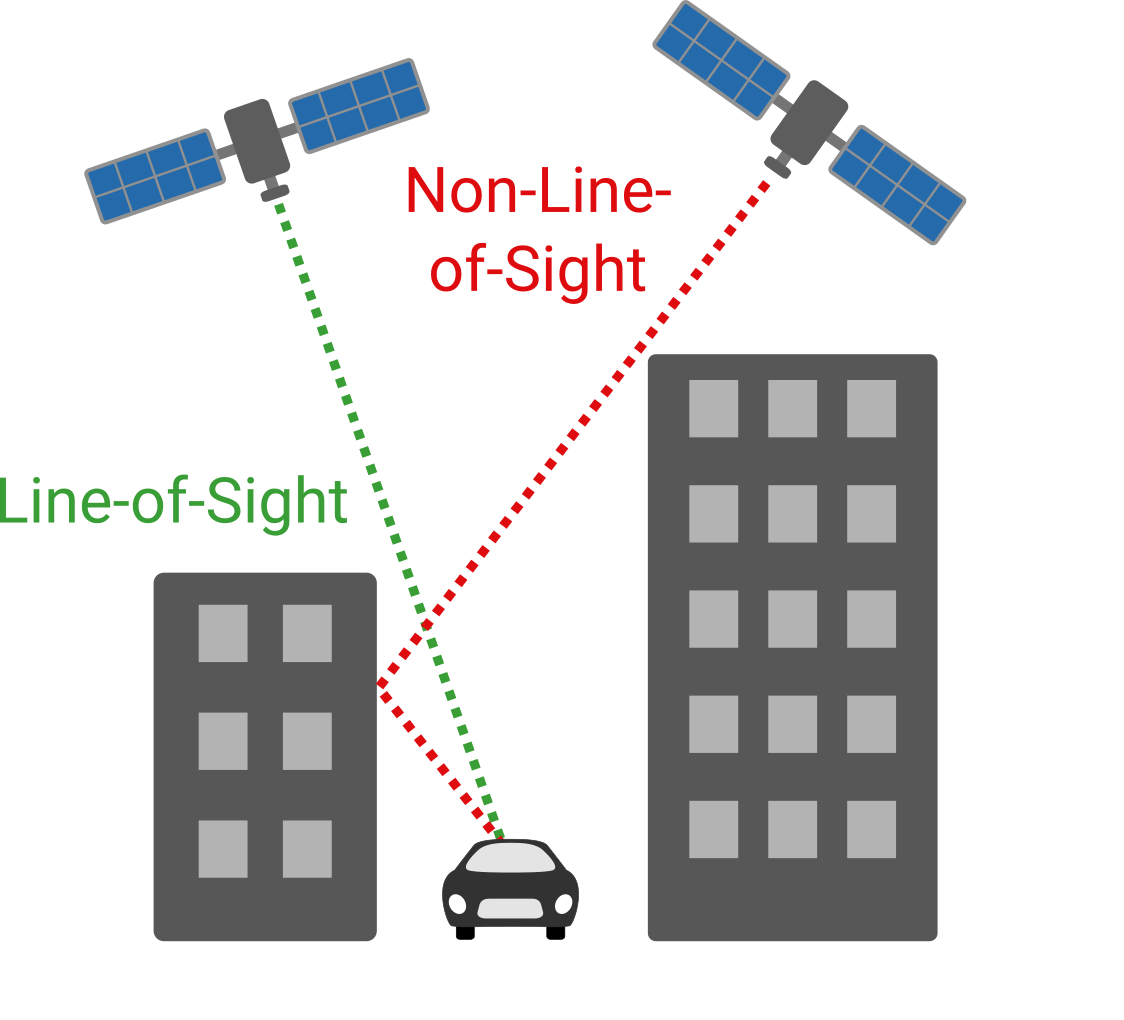
Multimodale Lokalisierung mittels GNSS
Eine der Herausforderungen des autonomen Fahrens ist die spurgenaue Lokalisierung des Fahrzeugs mittels GPS. Gerade in urbanen Umgebungen treten jedoch Reflexionen der GPS-Signale an Häuserwänden auf und verfälschen einen Teil der Messungen. In der Abschlussarbeit soll untersucht werden, wie sich durch neuartige Schätzverfahren der so verursachte Lokalisierungsfehler verringern lässt...
Bachelorarbeiten (Auswahl)
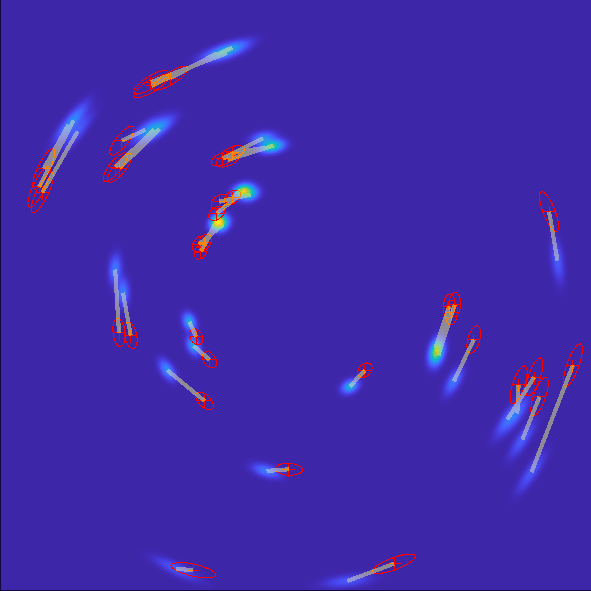
Erweiterung Radar-Framework
Ein wichtiger Aspekt bei der autonomen mobilen Robotik ist die Zustandsschätzung. Typischerweise tragen unterschiedliche Sensoren dazu bei. Wir verwenden u.a. einen aus dem Automobilbereich stammenden Radar-Sensor zur Bewegungsschätzung. Im Rahmen der anzufertigenden Abschlussarbeit soll die momentane Bewegungsschätzung genauer untersucht und erweitert werden...

Erweiterte Fahrmanöver für einen autoähnlichen Modellroboter
In unserem Laborraum haben wir ein kleines Straßenszenario für mit Sensorik ausgestattete Modellautos aufgebaut. Aktuell können sich diese innerhalb ihrer Umgebung lokalisieren und gemeinsam bewegen. Im Rahmen der anzufertigenden Arbeit sollen Fahrmanöver sowie eine dynamische Pfadplanungskomponente für die Fahrzeuge implementiert werden...