Forschung im Bereich autonomer mobiler Robotik am Beispiel eines autonomen indoor Flugsystems
 In den vergangenen Jahren wurde die Entwicklung eines autonomen Flugsystems an der Professur für Prozessautomatisierung erfolgreich vorangetrieben. Dabei sehen wir den primären Anwendungsfall und auch die größte Herausforderung bzw. das meiste Forschungspotential in der Nutzung dieser Systeme im Innenbereich. Hierbei muss betont werden, dass unser Fokus nicht auf der Entwicklung eines neuen Flugsystems liegt, sondern in der Erweiterung eines etablierten Systems um zusätzliche Sensorik und dazu passender Algorithmik zur Auswertung und Weiterverarbeitung. Im angestrebten Idealfall bildet das System QuadroCopter dabei keine Einschränkung, sondern den konkreten Anwendungsfall zur Validierung der Forschungsarbeiten. D.h. die durchgeführten Forschungsarbeiten haben Allgemeingültigkeit auch für andere Anwendungen und beinhalten grundsätzlich folgende Themengebiete:
In den vergangenen Jahren wurde die Entwicklung eines autonomen Flugsystems an der Professur für Prozessautomatisierung erfolgreich vorangetrieben. Dabei sehen wir den primären Anwendungsfall und auch die größte Herausforderung bzw. das meiste Forschungspotential in der Nutzung dieser Systeme im Innenbereich. Hierbei muss betont werden, dass unser Fokus nicht auf der Entwicklung eines neuen Flugsystems liegt, sondern in der Erweiterung eines etablierten Systems um zusätzliche Sensorik und dazu passender Algorithmik zur Auswertung und Weiterverarbeitung. Im angestrebten Idealfall bildet das System QuadroCopter dabei keine Einschränkung, sondern den konkreten Anwendungsfall zur Validierung der Forschungsarbeiten. D.h. die durchgeführten Forschungsarbeiten haben Allgemeingültigkeit auch für andere Anwendungen und beinhalten grundsätzlich folgende Themengebiete:
- Sensordatenverarbeitung Hierbei geht es hauptsächlich um die Aufbereitung und Verknüpfung von Sensordaten. Aktuell werden ein Ultraschallsensor, Optical Flow Sensor und eine Inertial Measurement Unit (IMU) verwendet, um das System automatisch über einer Position schweben zu lassen. Mit weiterer Integration einer Farbkamera kann ebenso ein automatisches Landemanöver durchgeführt werden. Unser Ziel ist es, im Rahmen von studentischen Abschlussarbeiten, die Umgebungswahrnehmung durch weitere Sensorik zu verbessern und vor allem robuster zu gestalten. U.a. sind folgende Arbeiten geplant:
- Positionsbestimmung mit einer Mono-Kamera Eine Farbkamera wird genutzt, um Feature-Punkte zu finden, zu verfolgen und unter Verwendung von IMU Sensorik, eine relative Position zu berechnen. Ein solches Prinzip wurde bereits erfolgreich von anderen Gruppen eingesetzt und soll jetzt auch in unser System integriert werden. Grundlage ist das PTAM System von Georg Klein (PTAM Demo Videos).
- Sensorfusion unter Berücksichtigung aktueller Entwicklungen Bisherige Ansätze zur Echtzeit-Sensordatenfusion nutzen fast ausschließlich Filteransätze die auf verschieden Varianten des Kalman Filters basieren. Aufgrund des verwendeten hochdynamischen, nichtlinearen Systems, ist es unser Ziel, die Sensordatenfusion unter Verwendung von Optimierungsansätzen zu verbessern. Hierzu sind verschiedene Ansätze und (Minimal-) Beispiele zu implementieren und zu bewerten.
- Bildverarbeitung zur Umgebungswahrnehmung Untersuchung der LIBVISO2 und fovis Bibliothek auf einen sinnvollen Einsatz in Verbindung mit dem System QuadroCopter. Insbesondere sollte hier die Machbarkeit untersucht werden und die Vor- bzw. Nachteile im Vergleich zu ähnlichen Ansätzen, die zumeist nur auf RGB-D Kameras ausgelegt sind.
-
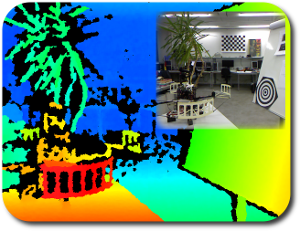 Verarbeitung von 3D Daten Mit dem Erscheinen des preisgünstigen und leistungsfähigen RGB-D Sensor Kinect wurden vielfältige Anwendungen im Bereich der Robotik möglich. Quelloffene Treiber ermöglichen die Nutzung der 3D und Farbinformationen für eigene Anwendungen. Neben dem normalen Farbbild liefern RGB-D Kameras für jeden Pixel im Bild eine Entfernungsinformation. Es ist also möglich, Objekte im Bild nicht nur visuell wahrzunehmen, sondern gleichzeitig auch in ihrer räumlichen Struktur zu beschreiben. In möglichen Bachelor- und Masterarbeiten sollen die RGB-D Daten zur sicheren Navigation unseres QuadroCopters inkl. Ausweichen von statischen oder beweglichen Hindernissen, Fliegen durch Türen, Engstellen usw. genutzt werden. Die Themen können in folgenden Gebiten angesiedelt sein: Sensordatenfusion, Kartographierung und Lokalisierung (SLAM / Erstellung eines texturierten 3D-Modells)
Verarbeitung von 3D Daten Mit dem Erscheinen des preisgünstigen und leistungsfähigen RGB-D Sensor Kinect wurden vielfältige Anwendungen im Bereich der Robotik möglich. Quelloffene Treiber ermöglichen die Nutzung der 3D und Farbinformationen für eigene Anwendungen. Neben dem normalen Farbbild liefern RGB-D Kameras für jeden Pixel im Bild eine Entfernungsinformation. Es ist also möglich, Objekte im Bild nicht nur visuell wahrzunehmen, sondern gleichzeitig auch in ihrer räumlichen Struktur zu beschreiben. In möglichen Bachelor- und Masterarbeiten sollen die RGB-D Daten zur sicheren Navigation unseres QuadroCopters inkl. Ausweichen von statischen oder beweglichen Hindernissen, Fliegen durch Türen, Engstellen usw. genutzt werden. Die Themen können in folgenden Gebiten angesiedelt sein: Sensordatenfusion, Kartographierung und Lokalisierung (SLAM / Erstellung eines texturierten 3D-Modells)
- Systemintegration Ist die Aufgabe, funktionstüchtige Algorithmen auf geeignete Hardware zu portieren. Im konkreten Anwendungsfall heißt das, dass nur begrenzte Rechenkapazität auf den verwendeten embedded PC-Systemen zur Verfügung steht. Die auch häufig im industriellen Umfeld eingesetzten PC-Systeme bieten den Vorteil kleiner Bauformen und geringem Energieverbrauch. Sollte ein System für einen geplanten Verwendungszweck nicht ausreichen, liegt die Verwendung mehrerer solcher Systeme nahe. Mögliche Themen für Abschlussarbeiten beinhalten folgende Aufgaben:
- Portierung und Untersuchung der Leistungsfähigkeit von Algorithmen auf ein Gumstix Embedded PC-System
- Mikrocontrollerprogrammierung
-
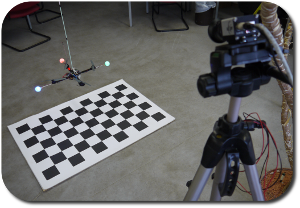 Regelung Wird für den low-level Bereich schon von der Firmware des Flugsystems abgedeckt, doch zur Positionsregelung wird bspw. eine weitere, höhere, Regelungs-Ebene benötigt. Diese wiederum ist abhängig von korrekten und robusten Sensordaten und somit erst von größerer Bedeutung, wenn das Problem der Sensordatenverarbeitung ausreichend gut gelöst ist. Abschlussarbeiten in diesem Bereich können allerdings unabhängig davon mit unserem Indoor Tracking System verwirklicht werden.
Regelung Wird für den low-level Bereich schon von der Firmware des Flugsystems abgedeckt, doch zur Positionsregelung wird bspw. eine weitere, höhere, Regelungs-Ebene benötigt. Diese wiederum ist abhängig von korrekten und robusten Sensordaten und somit erst von größerer Bedeutung, wenn das Problem der Sensordatenverarbeitung ausreichend gut gelöst ist. Abschlussarbeiten in diesem Bereich können allerdings unabhängig davon mit unserem Indoor Tracking System verwirklicht werden.
- Kartenerstellung Ist eng mit der Sensordatenverarbeitung verknüpft und beinhaltet die Kartierung eines zuvor unbekannten Gebietes. Der Begriff einer Karte ist in der Robotik etwas allgemeiner gehalten und nicht mit dem menschlichen Verständnis einer Karte gleichzusetzen. Für die Erstellung einer Karte liegt die Verwendung einer RGB-D Kamera nahe.
- Lokalisierung Ist eng mit der Sensordatenverarbeitung und Kartenerstellung verknüpft und nur zur Vollständigkeit separat aufgelistet.
- Navigationsplanung Um einen Roboter komplett autonom zu gestalten, müssen Gebiete automatisch exploriert werden und Wege in bereits bekannten Gebieten geplant werden. Hierbei kommt es nicht nur auf die Planung in der statischen Karte an, sondern auch auf die Reaktion auf plötzlich auftretende Hindernisse und dynamischen Objekten. Sollte Interesse auf diesem Gebiet vorliegen, werden auch in diesem Themenbereich gern Abschlussarbeiten vergeben. Die Arbeit in diesem Bereich wird hauptsächlich mit Simulationssoftware wie z.B. Gazebo durchgeführt.