SpaceBot Cup - Autonome Roboter für die Planetenerkundung
![]() Roboter sind heutzutage allgegenwärtig - auf der Erde und im All. Die mit Hightech vollgepackten Helfer übernehmen hier vielfältige Jobs. Die Weltraumrobotik gilt längst als Schrittmachertechnologie auch für terrestrische Anwendungen von der Medizintechnik bis zu Fahrerassistenzsystemen.
Roboter sind heutzutage allgegenwärtig - auf der Erde und im All. Die mit Hightech vollgepackten Helfer übernehmen hier vielfältige Jobs. Die Weltraumrobotik gilt längst als Schrittmachertechnologie auch für terrestrische Anwendungen von der Medizintechnik bis zu Fahrerassistenzsystemen.
Vor diesem Hintergrund lobte das Deutsche Zentrum für Luft- und Raumfahrt (DLR) im Jahr 2012 und 2014 einen Wettbewerb aus - den "SpaceBot Cup". Bundesweit gesucht wurden außergewöhnliche Ideen, die zunächst als Projektskizze eingereicht werden konnten. Wir waren 2012 und 2014 jeweils eines von zehn Teams, die zum Wettbewerb angenommen wurden. Gefördert wird das Projekt vom Bundesministerium für Wissenschaft und Technologie, das jedem Team 50.000€ zur Verfügung stellt.
Die Aufgabe
Die Aufgabe beim SpaceBot Cup ist anspruchsvoll: Die Roboter sollen autonom ein zerklüftetes Gelände - wie man es auch auf dem Mond oder Mars antreffen würde - erkunden und interessante Objekte aufspüren und transportieren.
Die Aufgabe in Stichpunkten:
- Es ist ein 36x28 Meter großes Gelände zu erkunden. Das Gelände besteht aus steinigem und sandigem Boden. Weiterhin sind große Felsbrocken und Geröll anzutreffen. Es gibt bis zu 30° steile Steigungen.
- Die Roboter sollen möglichst autonom agieren. Wie bei einer echten Raumfahrtmission hat die "Bodencrew" keinen direkten Sichtkontakt zu den Robotern und die Kommunikation ist nur zu bestimmten Zeiten und nur mit Verzögerung möglich. Außerdem können Signale verloren gehen oder die Kommunikation zeitweise ausfallen.
- Es dürfen nur zweimal Kommandos an den Roboter gesendet werden, alles weitere wird mit Strafpunkten belegt.
- Im Gelände befinden sich drei Objekte. Diese interessanten Objekte sollen gefunden, mittels eines Greifarms aufgenommen und transportiert werden. Für die volle Punktzahl sollen die drei Objekte noch montiert werden.
- Anschließend sollen die Roboter zum Ausgangspunkt (die Landezone) zurückkehren.
Impressionen vom SpaceBot Cup / Camp 2015
Qualifikation und Finale
Im September konnten wir uns in der Vorrunde des vom DLR initiierten Wettbewerbs SpaceBot Cup behaupten. Wir standen in Konkurrenz mit 10 nationalen Teams aus verschiedenen Universitäten und qualifizierten uns als eines von 3 Teams für den Endwettbewerb. Dieser fand in Form des SpaceBot Camp am 13. November statt. Zuvor konnten die Systeme zwei Tage lang ausgiebig getestet werden.
In den offiziellen Videos des Veranstalters wird unser Team vorgestellt: Teamvorstellung. Zusätzlich gibt es einen zusammenfassenden Rückblick auf den Wettbewerb: DLR SpaceBot Camp 2015.
Es folgen weitere Eindrücke aus der Qualifikation und der finalen Leistungsschau:
-

Teamfoto vom SpaceBot Camp 2015. Foto: TU Chemnitz -

Wartungsarbeiten am Übungstag. Foto: TU Chemnitz -
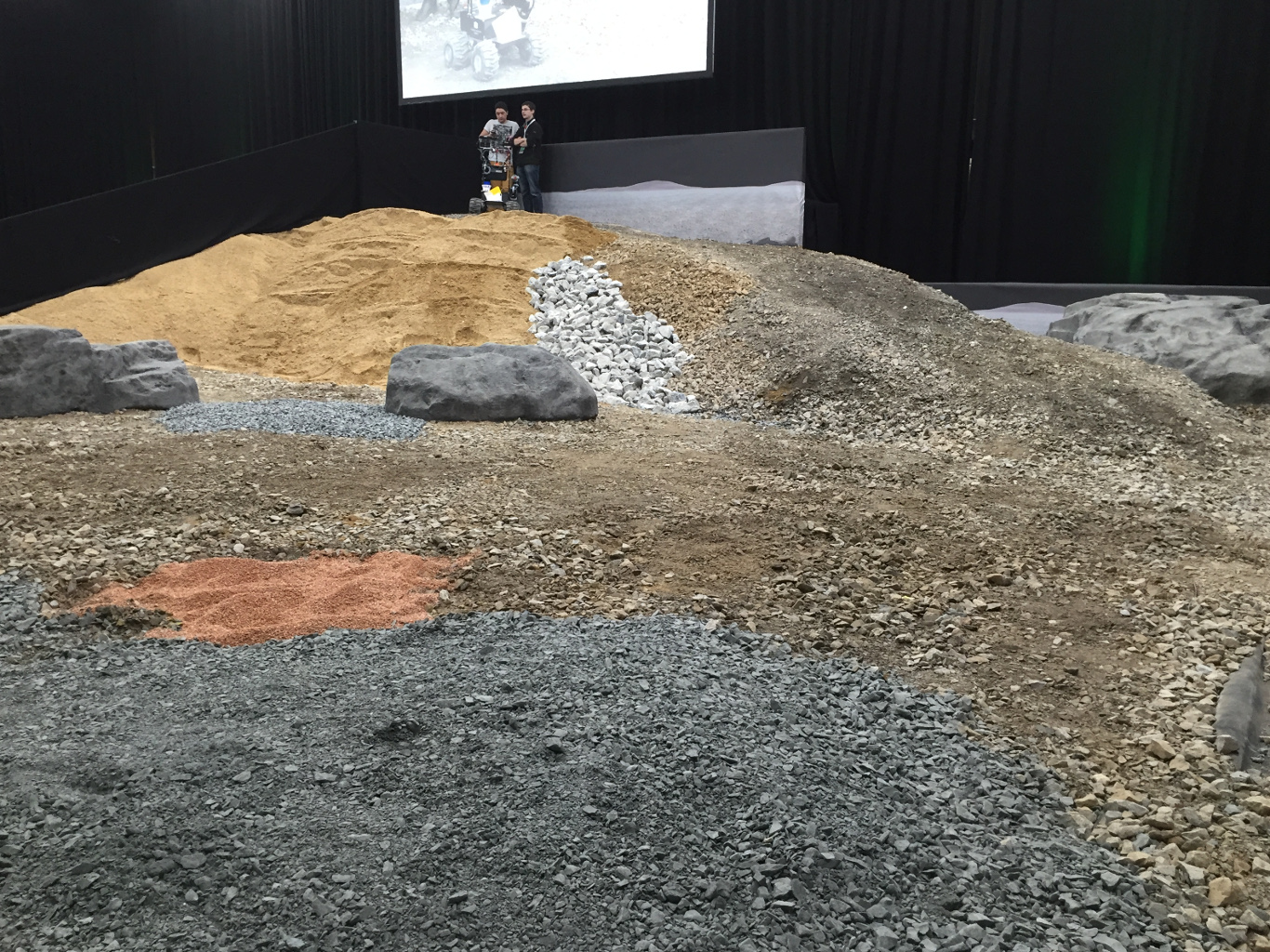
Kurzer Eindruck vom Spielfeld. Foto: TU Chemnitz -

Kurzer Eindruck vom Spielfeld. Foto: TU Chemnitz -

Kurzer Eindruck vom Spielfeld. Foto: TU Chemnitz -

Roboter Deimos auf dem Spielfeld. Foto: TU Chemnitz -
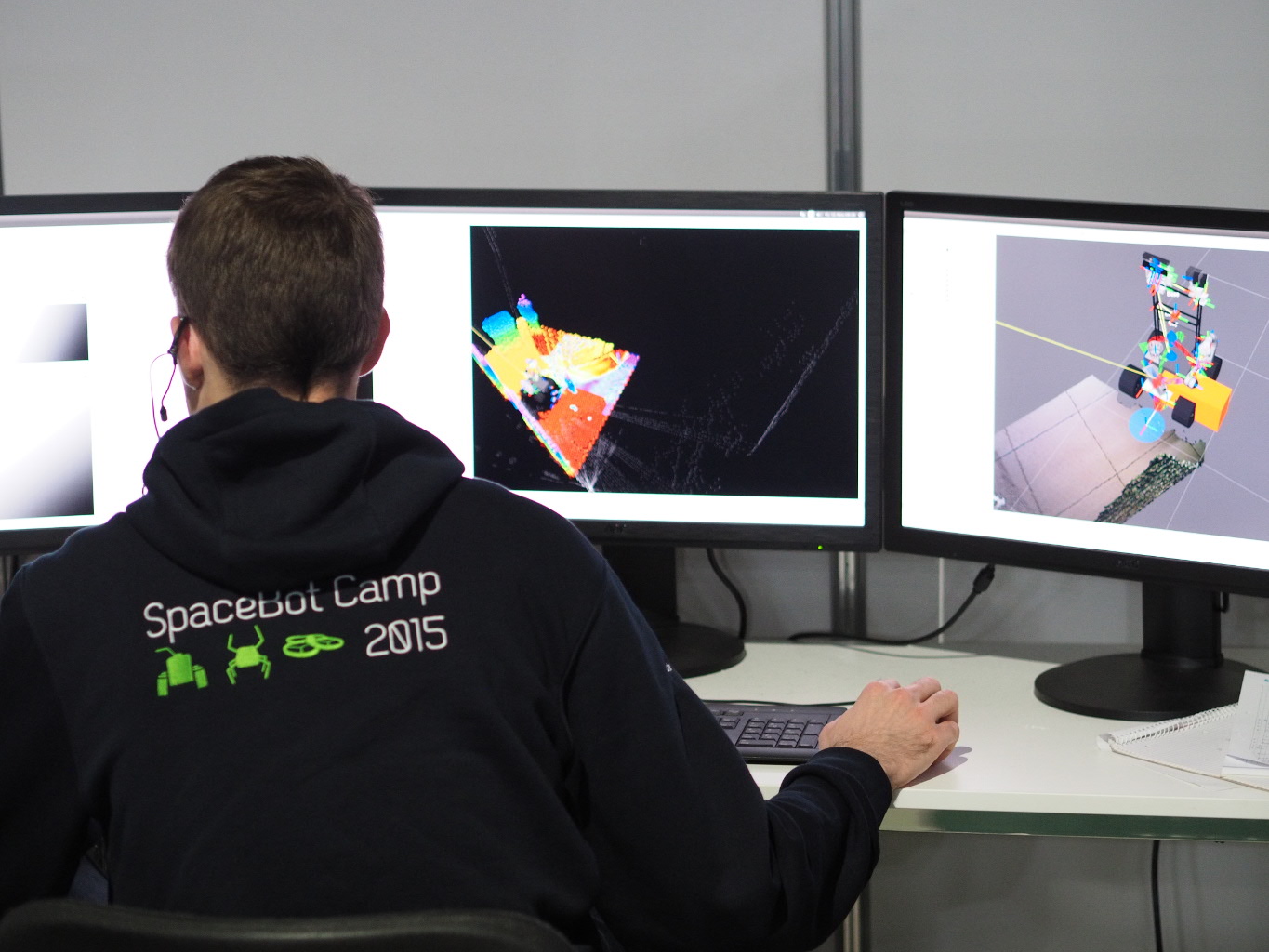
Blick auf unsere Bodenkontroll-Staion für Roboter Deimos. Foto: TU Chemnitz -
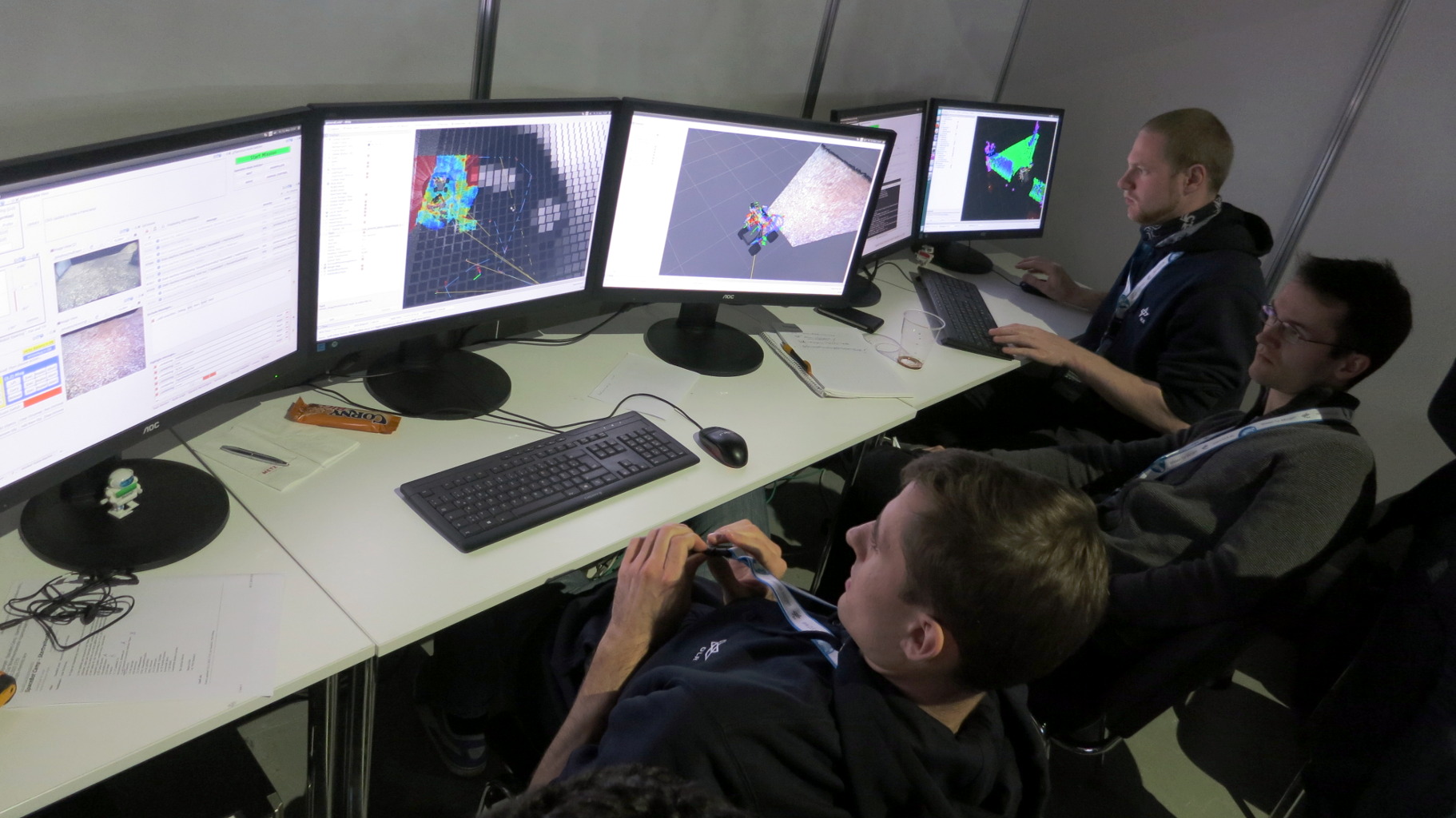
Blick auf unsere Bodenkontroll-Staion während des Demonstratsionslaufs zum SpaceBot Camp 2015. -
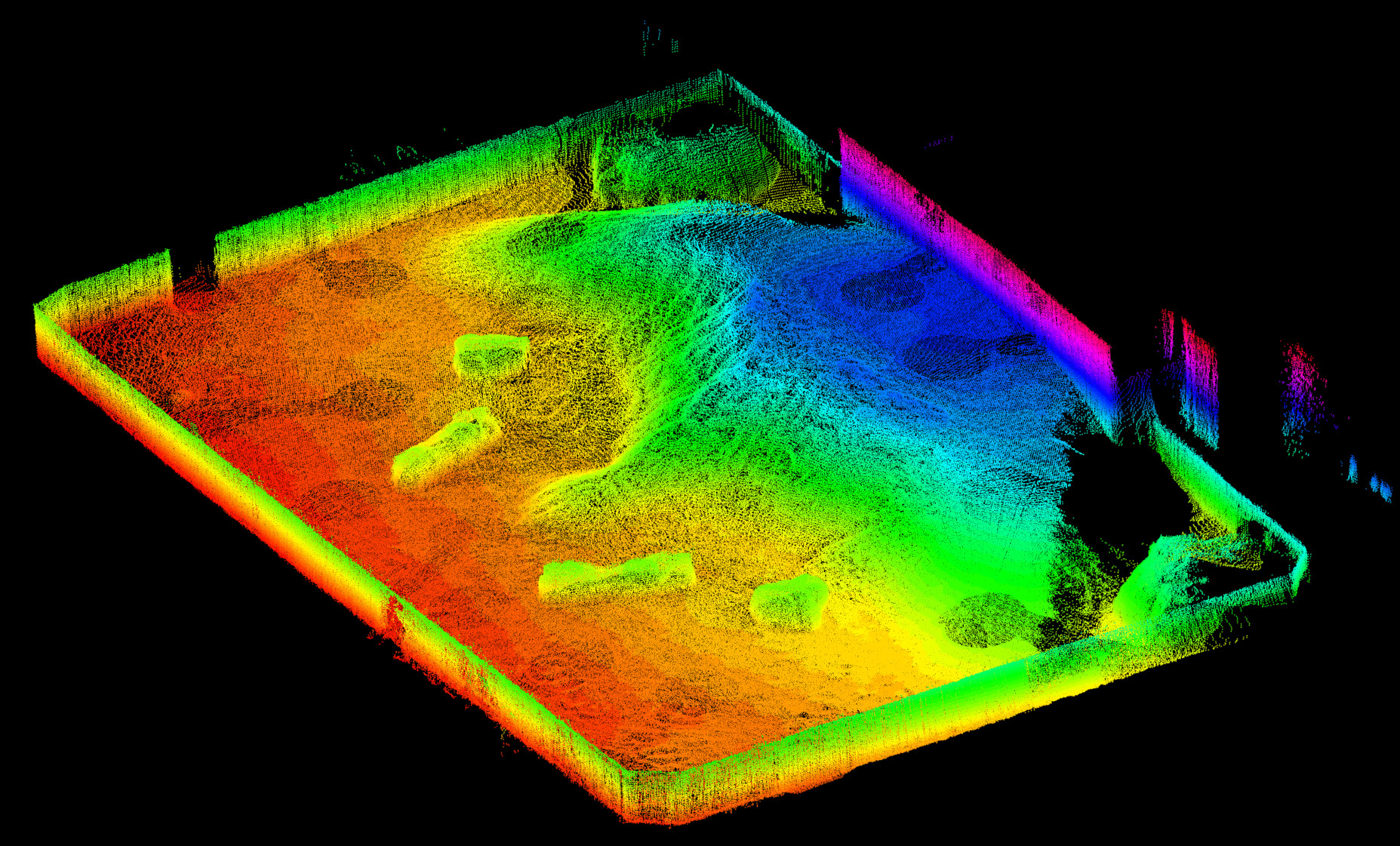
Registrierter 3D-Laserscan vom SpaceBot Camp 2015 Spielfeld.
2. Video: Beide Roboter auf dem Spielfeld im Explorations- und Objekt-Aufnahme-Modus.
Vorbereitungen im Labor
Greiftests (Juli 2015)
-
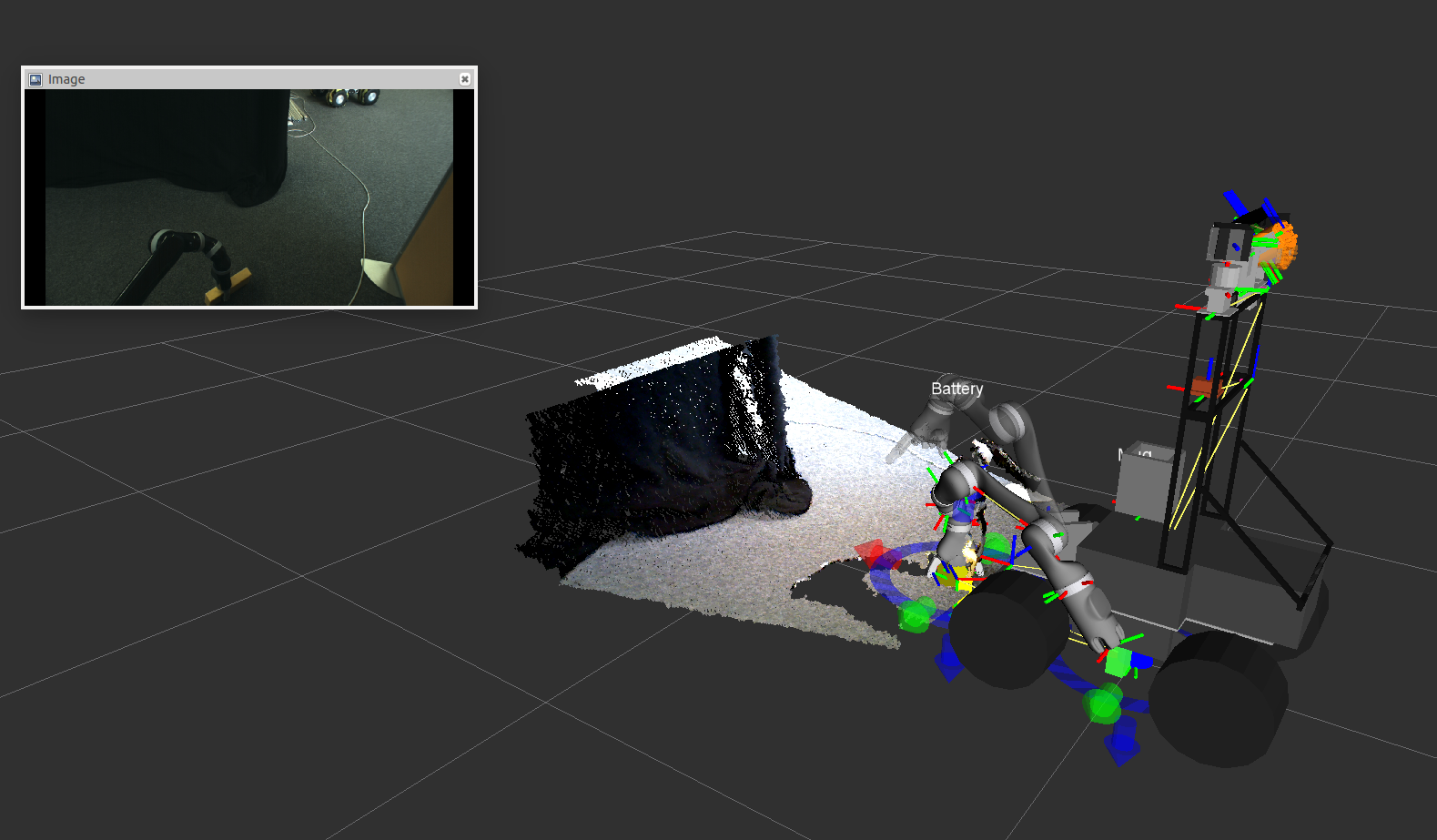
Ansicht in RViz von Greifvorgang der Batterie -
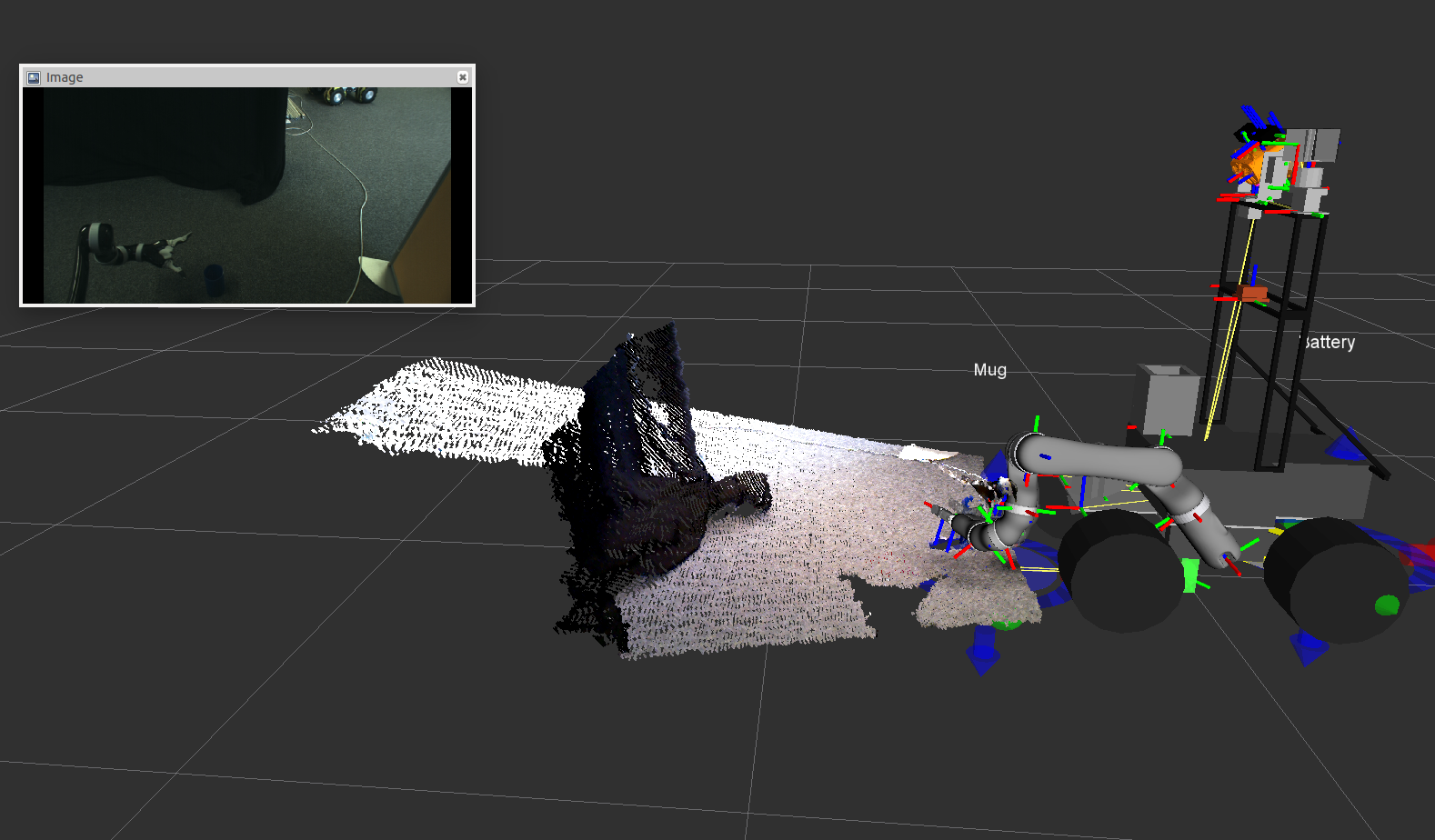
Ansicht in RViz von Greifvorgang des Bechers -
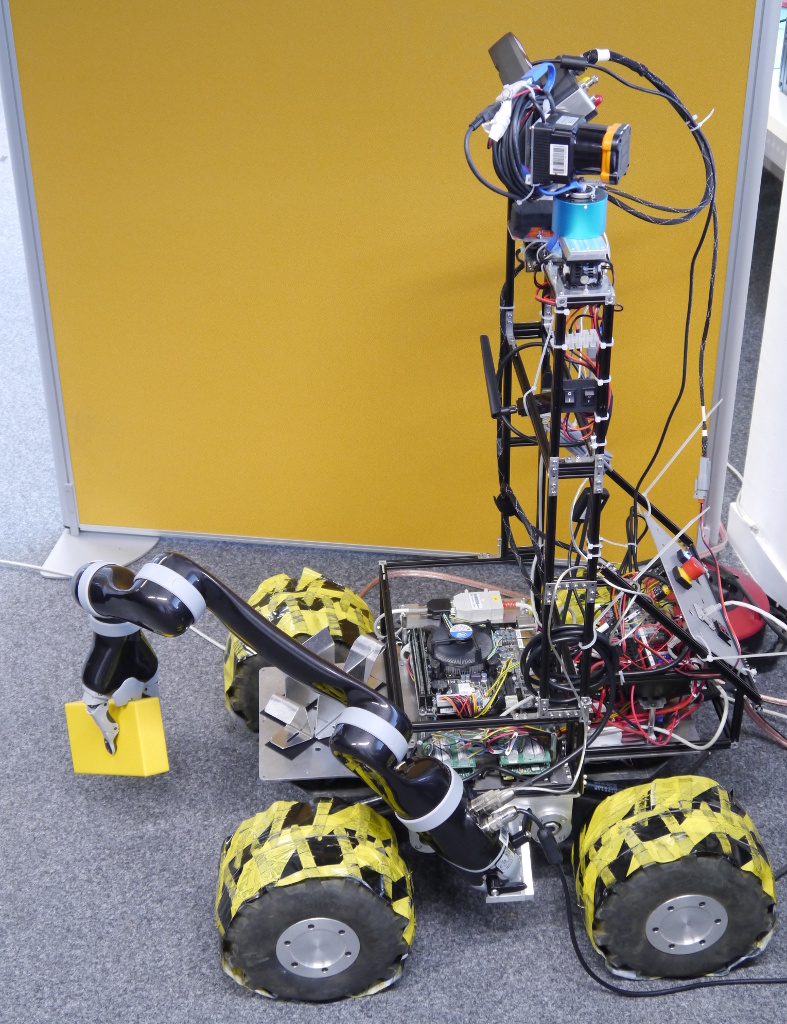
Rover mit Batterie
3D-Laserscan des Labors (Juni 2015)
-
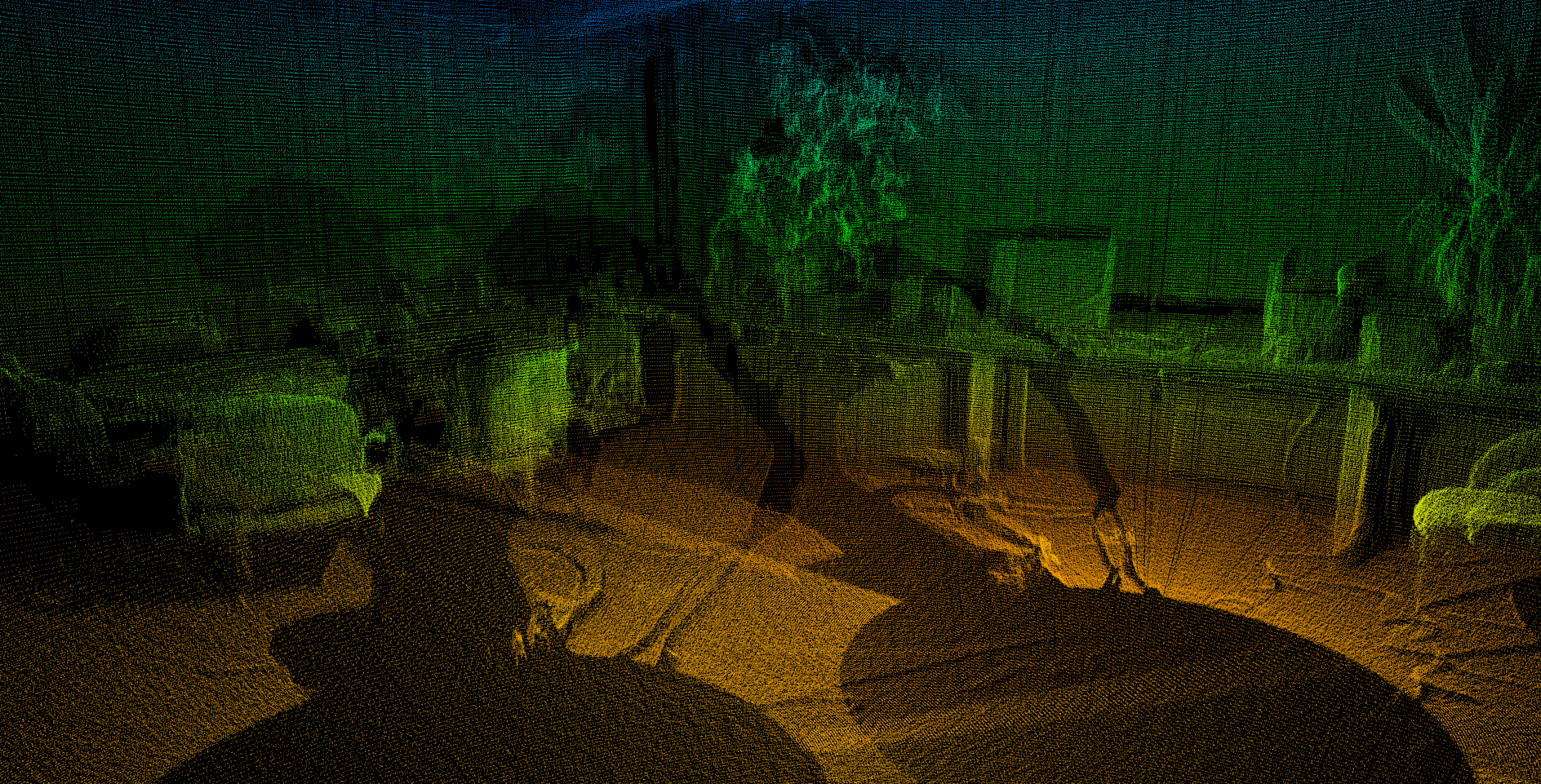
3D-Laserscan unserer Besprechungsecke im Labor -
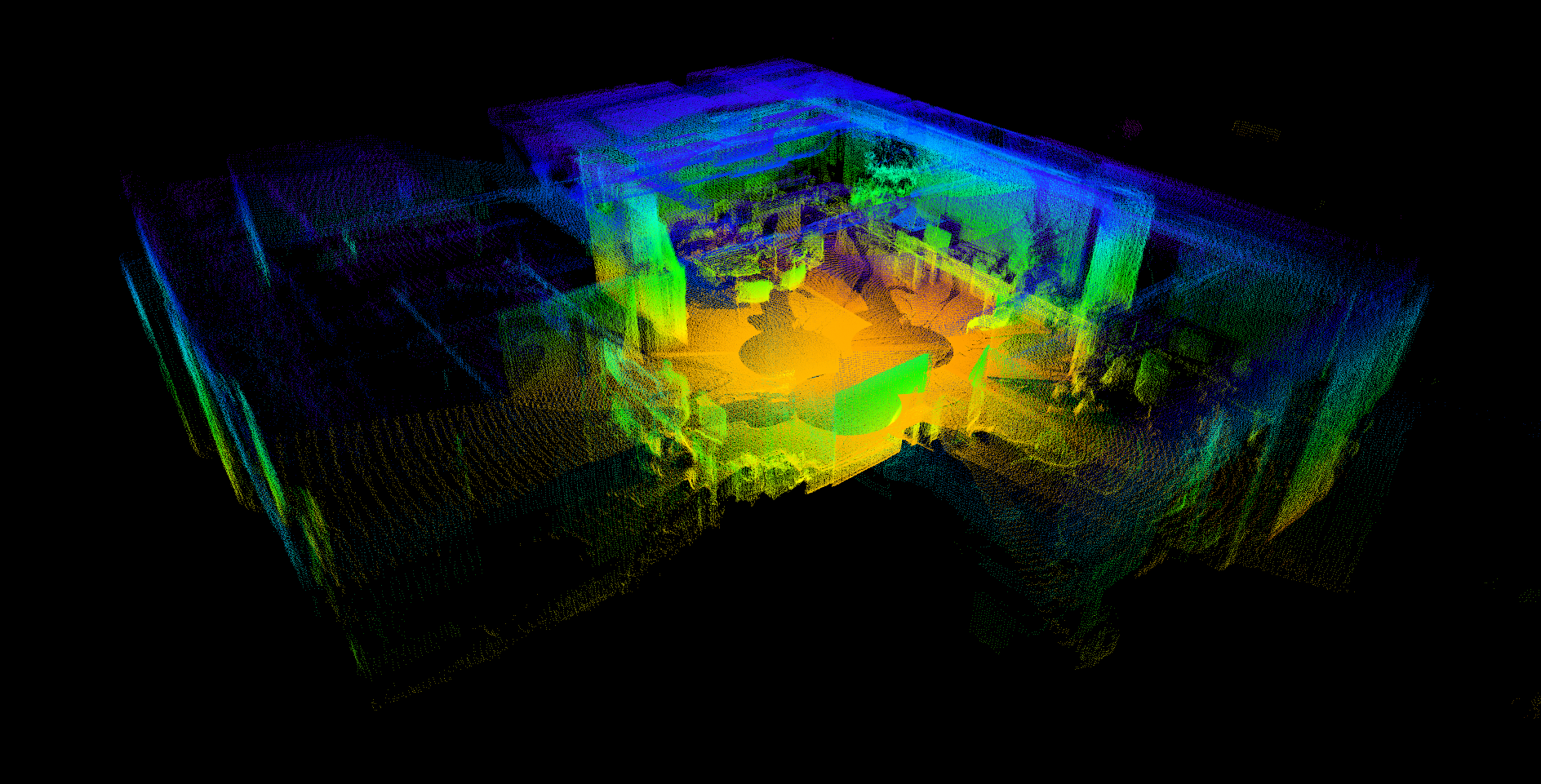
3D-Laserscan unseres Labors -
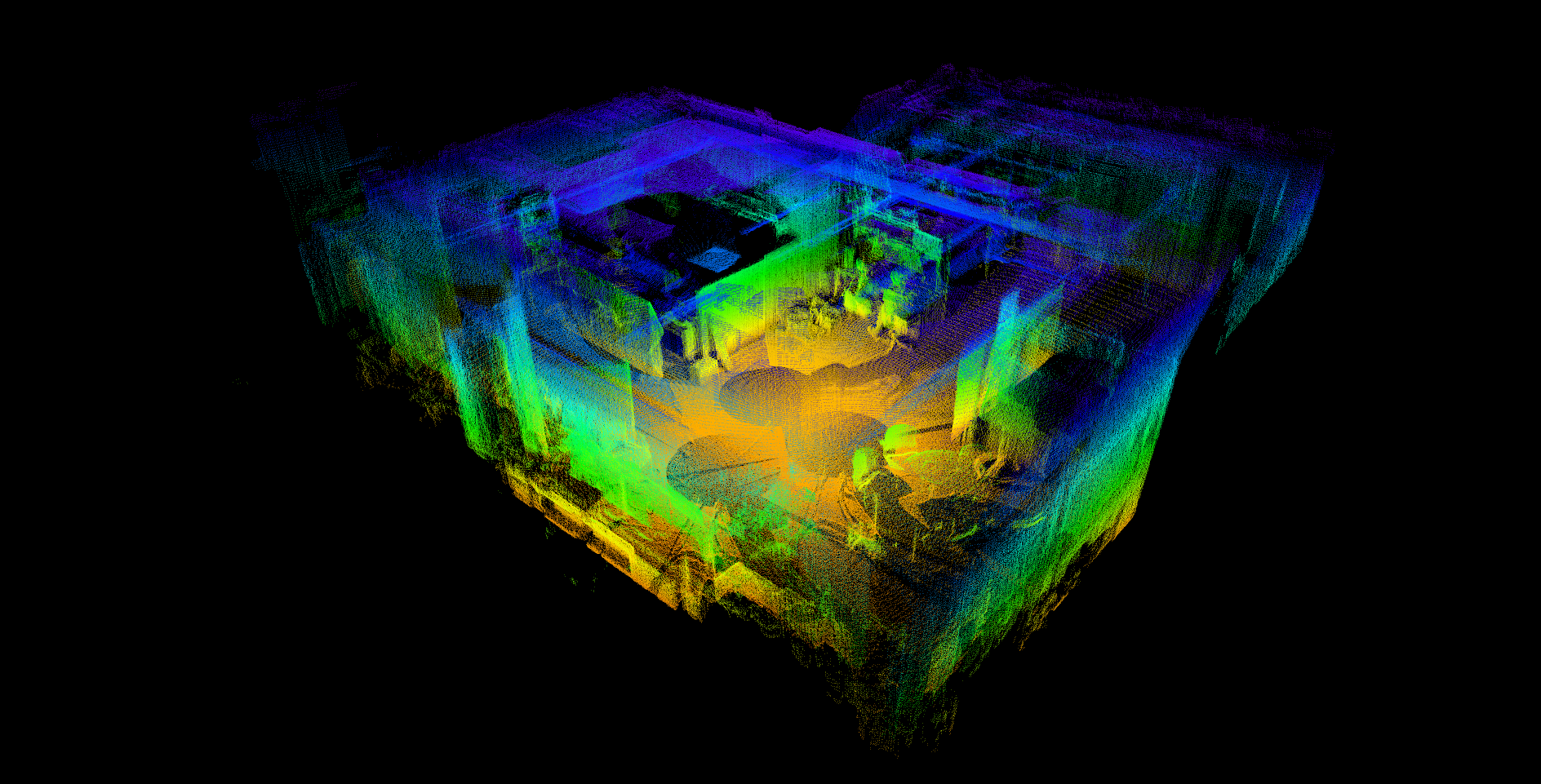
3D-Laserscan unseres Labors
Unser Konzept
Unser Konzept zur Bewältigung dieser Aufgabenstellung sieht zwei kooperierende Roboter am Boden vor, die optional von einem fliegenden Roboter unterstützt werden können:
Autonomous Exploration Rover (AER) Aufgabe der beiden AER ist es, die Umgebung autonom und systematisch zu erkunden, zu kartieren und die vorgegebenen Objekte zu suchen. Dafür werden 3D-Kameras (RGB-D) und Laserscanner benuztzt. Die beiden Roboter Phobos und Deimos (nach den beiden Monden des Mars benannt) sind ebenfalls mit einem Greifarm ausgestattet. Nachdem die zu suchenden Objekte identifiziert sind, werden sie mit Hilfe der Greifarme aufgenommen und zum Basisobjekt transportiert, wo sie montiert werden. Wir benutzen zwei Rover vom Typ Summit XL der Firma Robotnik.
Autonomous Aerial Explorer (AAE) Aufgabe des fliegenden AAE ist, die Einsatzumgebung autonom in Form eines Suchmusters zu überfliegen und Bilder der Umgebung an die Bodenstation zu übertragen, damit bereits erste interessante Objekte, Gefahrenstellen und allgemeine Geländeinformationen identifiziert werden können. Als Demonstrator für den AAE soll ein Quadrocopter zum Einsatz kommen, der eine Einsatzdauer von etwa 10 Minuten haben wird. Bei realen Weltraummissionen kann eine fliegende Plattform wie der AAE selbstverständlich nur bei geeigneter Atmosphärenbeschaffenheit realisiert werden (bzw. durch einen im Orbit befindlichen Satelliten mit hochauflösender Kamera), bei terrestrischen Rettungseinsätzen ist eine autonome Lufterkundung jedoch das Mittel der Wahl. Der AAE ist daher optional und nicht missionskritisch.
Verwendete Sensoren Für einen autonomen Roboter ist die genaue Wahrnehmung der Umwelt enorm wichtig. Wir verwenden eine RGB-D-Kamera (zum Beispiel die Kinect von Mircosoft oder die Asus Xtion) bzw. eine Stereokamera für die dreidimensionale Wahrnehmung der Umgebung. Diese Kameras liefern eine dreidimensionale sog. Punktwolke, also zu jedem Pixel im Bild auch die 3D-Koordinaten (x,y,z). Mit Hilfe dieser 3D-Daten berechnen wir ein Modell der Umgebung, erstellen eine Karte, navigieren und messen die Bewegung des Roboters. Weiterhin werden die zu suchenden Objekte mittels der Bildverarbeitung gefunden. Die Kameras unterstützen später auch das Greifen und Manipulieren der Objekte.
Wissenschaftliche, Technische und Algorithmische Themengebiete
Die beim SpaceBot-Cup gestellte Aufgabe berührt eine ganze Reihe interessanter wissenschaftlich-technischer Themengebiete:
- Geländeanalyse: Die Roboter bewegen sich in unwegsamen und teilweise gefährlichem Gelände. Bevor ein Geländebereich "betreten" wird, müssen die Roboter deshalb unbedingt eine Analyse der Gefährlichkeit und Befahrbarkeit durchführen. Beispielsweise sollten Abschnitte mit großer Steigung oder tiefer, lockerer Sandboden als potentiell gefährlich eingestuft werden. Wir wollen dazu die Daten der Stereokamera bzw. RGBD-Kamera verwenden. Die Bewertung geschieht anhand der 3D-Struktur des Geländes und der Textur.
- Pfadplanung: In enger Verzahnung mit der Gefahrenanalyse müssen sichere Wege durch das Gelände geplant werden. Dabei sollen besonders gefährliche Stellen umfahren werden. Der Roboter wird also lieber einen Umweg in Kauf nehmen, als sich in gefährliches Gelände zu wagen.
- Bewegungsschätzung: Die Messung der aktuellen Bewegungsgeschwindigkeit erfolgt üblicherweise über Sensoren an den Rädern, ähnlich wie beim Auto. Diese Sensoren messen die Anzahl der Umdrehnungen und ermitteln so neben der momentanen Geschwindigkeit auch die zurückgelegte Strecke. Allerdings ist dieses Messprinzip sehr unzuverlässig, wenn die Räder z.B. auf Sand oder glattem Untergrund durchdrehen. Für eine genauere Messung der realen Bewegung des Roboters setzen wir daher auf visuelle Odometrie. Das bedeutet, dass die zurückgelegte Strecke anhand der Bilder der Kameras und 3D-Sensoren ermittelt wird.
- Kartierung und Lokalisierung: Der Roboter soll im SpaceBot-Cup die unbekannte Umgebung nicht nur erkunden, sondern auch kartographieren und die Position aller gefundenen interessanten Objekte in der Karte vermerken. Dafür sind spezielle Algorithmen notwendig. Die Herausforderung liegt darin, dass trotz der verwendeten visuellen Odometrie die Schätzung der Eigenbewegung mit Messfehlern behaftet ist. Diese Messfehler übertragen sich in die Karte, die daraufhin inkonsistent werden kann. Mit Hilfe von SLAM-Verfahren (siumultaneous localization and mapping) wollen wir trotzdem eine genaue Karte des Wettbewerbsgeländes erstellen.
- Objekterkennung
- Greifen und Manipulieren, Visual Servoing
- Kooperation mehrerer Roboter