Projekte
aiRobot: Intelligente Roboter für den Mittelstand
Inhalt
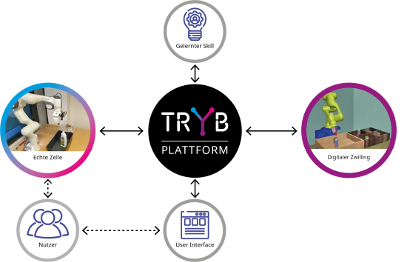
Im Vorhaben aiRobot soll eine simulations-
gestützte Trainingsplattform für intelligente
Fertigungsroboter entwickelt werden. Dazu wird
der Roboterarbeitsplatz gescannt und
automatisch ein digitaler Zwilling des
gewünschten Fertigungsprozesses erstellt. Der
digitale Zwilling kann nun in der sicheren
Simulationsumgebung umfassend vortrainiert
werden. Anders als ein Training in der Realität
kann dieses virtuelle Vortraining um ein
Vielfaches beschleunigt werden. Die Ergebnisse
des virtuellen Trainings können auf den realen
Roboter übertragen werden, der anschließend
nur noch für einen Bruchteil der derzeit
benötigten Zeit in realer Umgebung nachtrainiert
werden muss.
(Website)
Zeitraum
01.10.2023 - 30.09.2025
Partner
Isento GmbH
Wird gefördert durch
BMBF

DFG/SFB 1410 Project - C03 Learning Human-like Trajectories for Whole-Body Motions
Inhalt
Digital embodies, like robots, will appear in many shared environments in the near future. In contrast to virtual avatars, humanoid robots have an impressive presents for humans interacting with them. This leads to a more careful interaction than with virtual avatars. Human-like motions for humanoid robots increase their acceptance in shared workspaces and in the society. For humanoid robots it is not sufficient to look like humans, people also want to see predictable motions, which are supposed to fit their expectations. This is an important step to increase their acceptance. Human-like motions will avoid the so-called “Uncanny Valley”, which describes the feeling of seeing a living corpse. Thus, the goal of this research project is the development of new methods to achieve functional, collision free and human-like motions for humanoid robots.
Zeitraum
01.01.2020 - 31.12.2023 verlängert bis 30.06.2024
Wird gefördert durch

DFG/SFB 1410 Project - C04 Highly Dexterous Telemanipulation with Haptic Feedback and Shared Autonomy
Inhalt
Telemanipulation with robots will gain more attention in the future. Remote manipulation transmitted over large distances will enable dexterous manipulation in dangerous situations or in areas inaccessible for humans. Applications may range from space-robotics to medical telerobotics. The removal of mines or rescue operations after earthquakes demand for telemanipulated robots as well. Furthermore, concepts for telemanipulation can be adapted to control a virtual avatar with full body motions. The main research questions to focus on are, how can we transmit and reproduce sensor information as accurately as possible to let operators of telemanipulated systems feel like they are physically at the remote place, and how can we support teleoperated manipulation by a blend of shared autonomy and manual input? When we manipulate objects, haptic interaction plays a key role. Thus, the first purpose of this project is to create the feeling of real physical contact using a remotely operated machine. Our aim is to improve the controlled behavior of systems with a long-distance communication between humans and a teleoperated robot by using telemanipulation combined with haptic feedback.
Zeitraum
01.01.2020 - 31.12.2023
Wird gefördert durch
Abgeschlossene Projekte
KIN-TUC: Aufbau eines universitätsweiten Kooperationsnetzwerks Künstliche Intelligenz am Beispiel Ambient Assisted Living
Inhalt
Das Applikationsfeld für das Forschungsvorhaben des KI Kompetenznetzwerkes bezieht sich auf das sogenannte „Ambient Assisted Living“ (AAL), was die Unterstützung älterer oder beeinträchtigter Menschen durch entsprechende Systeme beschreibt. Der vermehrte Einsatz von KI in diesem Bereich kann die Zuverlässigkeit und Funktion dieser Systeme und Methoden erheblich verbessern. Zu dem ermöglicht die Kombination aus KI und AAL einen positiven Beitrag zur Bewältigung der Probleme aufgrund des demografischen Wandels. An der Untersuchung des Potentials Künstlicher Intelligenz im Bereich des AAL sind folgende Fakultäten mit den entsprechenden Professuren beteiligt:
- Elektrotechnik und Informationstechnik (Professuren: Digital- und Schaltungstechnik,
Prozessautomatisierung, Regelungstechnik und Systemdynamik, Robotik und Mensch-Technik-Interaktion, Schaltkreis- und Systementwurf)
- Informatik (Professuren: Künstliche Intelligenz, Rechnerarchitekturen und -systeme, Technische Informatik)
- Maschinenbau (Professur Sportgerätetechnik)
- Mathematik (Professur Wissenschaftliches Rechnen)
Zeitraum
31.05.2019 - 31.12.2021
Wird gefördert durch
SMWK

I-RobEka: Interaktionsstrategien für eine robotische Einkaufsassistenz:
Methodische Grundlagen der Interaktion und Navigation
Inhalt
In diesem Forschungsprojekt werden Szenarien betrachtet, bei denen autonome mobile Roboter Kunden als Einkaufshilfe zur Verfügung stehen. Das Einkaufsszenario steht dabei stellvertretend für menschliche Alltagsaufgaben mit hoher Interaktivität und einer komplexen und dynamischen Umgebung. Hierfür sollen interaktive Grundfertigkeiten wie z.B. die situative Begleitung, die Mitteilung von Handlungsanweisungen, die Verständigung über bestehende Beschränkungen und die Auswahl von Alternativen weiterentwickelt werden, um konzeptionelle und technische Grundlagen für eine soziale, kontext- und bedürfnisgerechte Mensch-Roboter-Interaktion zu schaffen. Der Leitgedanke des Projektes besteht in der Entwicklung eines adaptiven Interaktionskonzeptes für Service-Roboter.
(Website)
Zeitraum
01.04.2018 - 30.09.2021
Partner
LUNAR GmbH, Innok Robotics GmbH, Toposens GmbH, Technische Universität Chemnitz (Zentrum für Virtual Humans), Professur für Graphische Datenverarbeitung & Visualisierung, Professur Robotik und Mensch-Technik-Interaktion, Professur Prozessautomation, Professur für Medieninformatik
Wird gefördert durch
BMBF
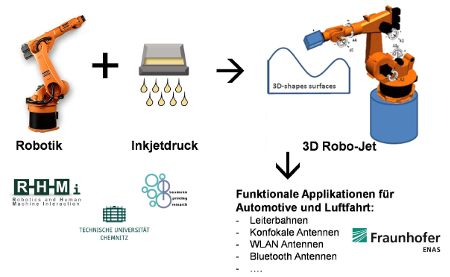
3D-ROBOJET: Inkjetdruck auf 3D-Oberflächen
Inhalt
Industrieübergreifend wächst der Bedarf an innovativen und individualisierten Bauteilen bzw. Produkten. Um individualisierte Produkte unter Wettbewerbsbedingungen des Marktes kosteneffizient fertigen zu können bedarf es digitaler Fertigungstechnologien wie zum Beispiel der Inkjet-Drucktechnologie. Die Inkjet-Drucktechnologie erlaubt die Herstellung von Druckbildern digital, wodurch sich die Maschinenrüstzeiten sehr reduzieren lassen.
Aus dem Bedarf des Einsatzes von Inkjet-Drucktechnologie zur Individualisierung von dreidimensionalen Bauteilen/Produkten ergründet sich das hier vorgeschlagene Projektvorhaben, welches zum Ziel hat die notwendige Technologie zu erschließen, um robotergestützt Zusatzfunktionen wie z.B. gedruckter Leiterbahnen oder Antennen auf dreidimensionale Objekte aufzubringen.
Zeitraum
01.03.2019 - 31.07.2021
Partner
Fraunhofer ENAS, ZFM
Wird gefördert durch


AugBot: Unterstützung von Mensch-Roboter-Interaktion mit Hilfe von Augmented Reality Brillen
Inhalt

Die Mensch-Roboter-Interaktion (MRI) ist ein wichtiger Bestandteil der Digitalisierung und Flexibilisierung in der modernen industriellen Produktion. Ziel dieses Forschungsprojekts ist es, durch den Einsatz von Augmented-Reality-Brillen (AR)-Brillen die MRI nutzerfreundlicher und sicherer zu gestalten. Es soll ein System entwickelt werden, welches mit Hilfe von AR-Brillen die MRI erleichtert. Im Projekt werden zwei Demonstrationen aufgebaut. Mit dem ersten Demonstrator werden dem Nutzer eines handgeführten Roboters durch die AR-Brille Singularitäten angezeigt, die beispielsweise zu umfahren sind. Zusätzliche werden für robotische Bewegungen geeignete Pfade zum Ziel angezeigt. Der zweite Demonstrator besteht aus einem Industrieroboter, bei welchem dem Nutzer beim Teach-Vorgang zusätzlich Simulations- bzw. CAD-Daten angezeigt werden. Dadurch erhält der Nutzer einen besseren Überblick beim programmieren der Arbeitsaufgabe. So lassen sich Montageroboter viel einfacher softwareunterstützt programmieren und Kollisionen sowie nicht erreichbare Konfigurationen werden vermieden.
Zeitraum
01.01.2018 - 31.08.2020
Wird gefördert durch
BMWi / AiF

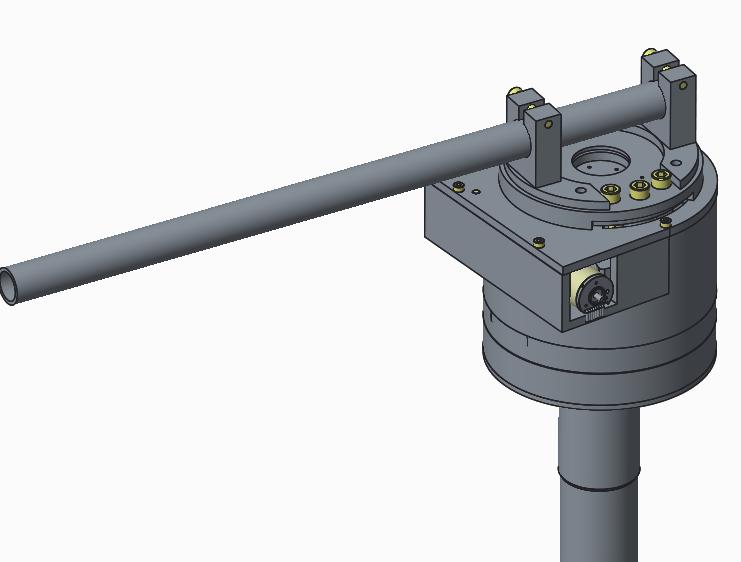
Entwurf eines humanoiden Dual-Arm-Roboters mit variabel programmierbaren, nicht linearen elastischen Gelenken
Inhalt
In diesem Projekt wird ein neues nicht lineares und elastisches Robotergelenk entworfen, welches sich für humanoide Roboter verwenden lässt. Dabei ist ein Prototyp für ein Gelenk zu entwickeln und dieses Gelenk mit entsprechenden Reglern zu versehen. Dabei können die Steifigkeiten variabel programmiert werden, so dass bestimmte Einstellungen des Robotergelenkes zu einem weichen Verhalten führen und andere die Steifigkeit erhöhen, so dass eine hohe Kraftübertragung erreicht wird. Dieses Verhalten erhöht die Sicherheit in der Mensch-Roboter-Interaktion einerseits und ermöglicht das Aufbringen größerer Kräfte andererseits. Ein solches Gelenk kann dabei als Kniegelenk für einen Roboter verwendet werden oder aber auch in Dual-Arm-Robotern. Der Prototyp eines solchen Gelenkes ist zu entwickeln und in den humanoiden Laufroboter TUCO zu integrieren.
Zeitraum
01.09.2017 - 31.08.2020
Bearbeiter
Hongxi Zhu
Wird gefördert durch
ESF-Promotionsförderung

3D-Szenenanalyse und Objekterkennung für aktive Perzeptionsaufgaben in der Robotik
Inhalt
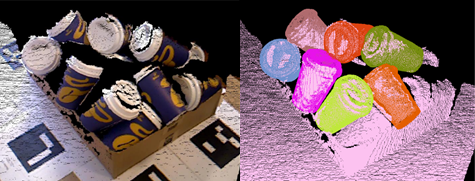
Ziel dieses Vorhabens ist die Analyse dreidimensionaler Szenen und die Erkennung sowie Lageschätzung bekannter Objekte. Dabei sollen Szenen nicht nur passiv untersucht werden, sondern durch Zuhilfenahme von Robotern auch aktiv verändert werden. Mit interaktiven Systemen lassen sich Mehrdeutigkeiten auflösen und Szenen in unstrukturierten Umgebungen analysieren.
Zeitraum
1.10.2016 - 30.9.2019
Bearbeiter
Hannes Kisner
Wird gefördert durch
ESF-Promotionsförderung
TASTSINN
Inhalt
In diesem Forschungsprojekt wird ein resistiver Kraftsensor weiter entwickelt und in eine Fünf-Finger-Roboterhand integriert. Die Auflösung des Sensors beträgt ca. 5 mm.
Zeitraum
01.04.2018 - 31.08.2019
Partner
Wessling Robotics, Oberpfaffenhofen
Wird gefördert durch
Bayerische Forschungsstiftung

SMErobotics
Inhalt
Ziel des Projekt SMErobotics war die Entwicklung von robotergestützten Fertigungsanwendungen für kleine und mittelständige Unternehmen (KMUs), sodass auch diese von den Vorteilen der voranschreitenden Automatisierung profitieren. Industrielle Endanwender sollen ihre Effizienz steigern können und gleichzeitig die Fähigkeit behalten, kundenspezifische Produkte in kleiner Stückzahl zu liefern.
Eine neue Generation von flexiblen Robotern und anpassungsfähigen Produktionsmaschinen sollen sich nahtlos in die manuelle Produktion einbinden lassen und dem erfahrenen Arbeiter zur Seite stehen.
Zeitraum
Das Projekte startete am Deutschen Zentrum für Luft- und Raumfahrt unter der Projektleitung von Dr.-Ing. Ulrike Thomas. Ein Teil des Projektes konnte mit ihrem Wechsel an die TU Chemnitz transferiert werden.
01.01.2012 - 30.06.2016
Partner
Fraunhofer IPA, Stuttgart, Comau, KUKA, Danish Technology Center, German Aerospace Center, Lund University, Güdel, Fortiss TUM
Wurde gefördert durch
siebtes EU Rahmenprogramm (FP7), Fördernummer 287787