ViPRICE - Visual Place Recognition in Changing Environments
Kurzbeschreibung
Navigation ist eine grundlegende Fähigkeit autonomer, mobiler Systeme. Für eine erfolgreiche Navigation sind Kenntnisse über die eigene Position in der Welt notwendig, entweder in Form von absoluten Positionsangaben oder relativ zu anderen Orten oder Dingen in der Welt. Die biologischen Vorbilder zeigen anschaulich, wie nützlich visuelle Sensorik für diese Aufgabe sein kann. Der Nutzen visueller Navigation auch für robotische Systeme und insbesondere die Weltraumrobotik zeigt sich beispielsweise durch die erfolgreiche Verwendung inkrementeller Schätzung der Eigenbewegung basierend auf Stereo Bilddaten (Visuelle Odometrie) auf den NASA Mars Rovern. Voraussetzung für diese Verfahren ist, dass die Aufnahmebedingungen (beispielsweise die Beleuchtung) zwischen den Aufnahmen weitestgehend konstant bleiben. Typischerweise ändern sich die Aufnahmebedingungen allerdings, wenn Orte über längere Zeiträume wiedererkannt werden sollen, beispielsweise im Verlauf eines Tages oder über Wochen und Monate hinweg. Menschen (und viele Tiere) können Orte rein aus Bildern wiedererkennen – auch dann, wenn sich das Aussehen dieser Orte stark verändert. Anschauliche Beispiele sind das Wiedererkennen von Orten zwischen verschiedenen Tageszeiten, verschiedenen Wetter- und Beleuchtungsbedingungen oder Jahreszeiten.
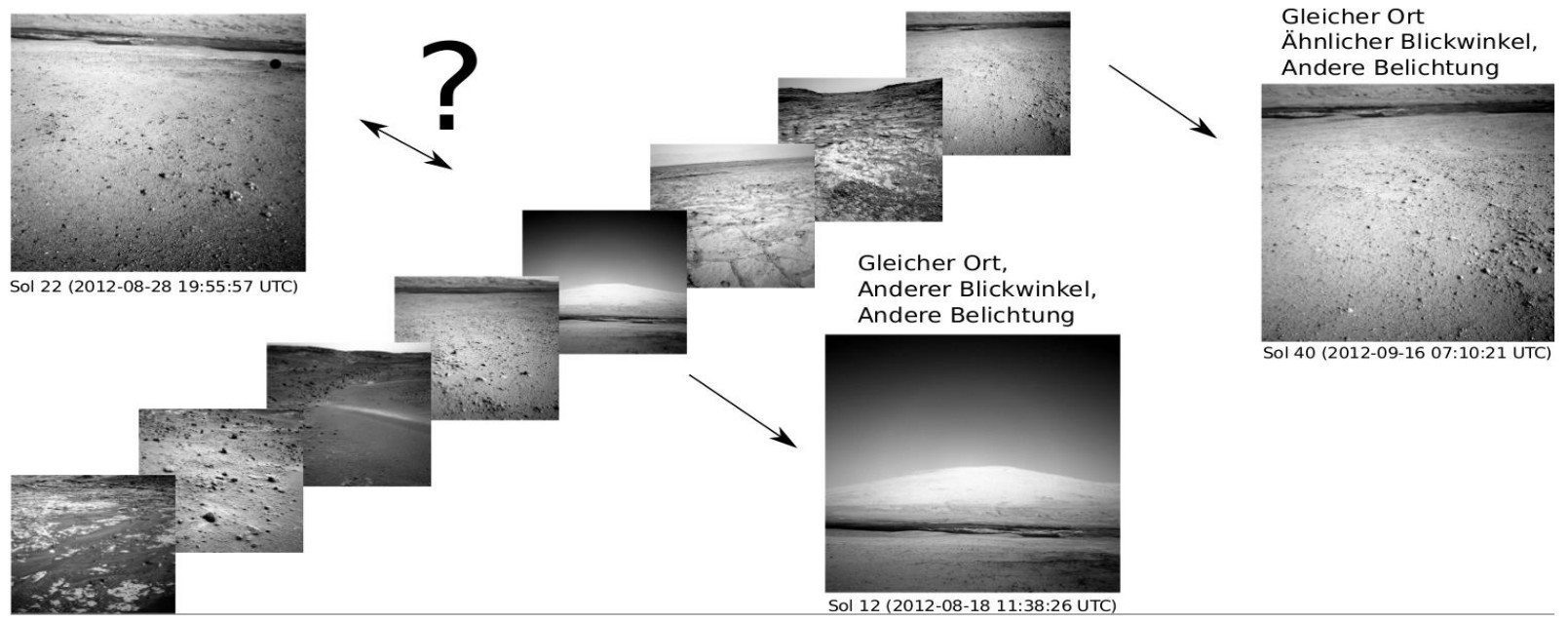
Das Wiedererkennen bekannter Orte mittels Bildverarbeitung wird in der Robotik als Visual Place Recognition bezeichnet. Die obige Abbildung illustriert die prinzipielle Vorgehensweise. Das aktuelle Bild (oben links) wird mit einer Datenbank bekannter Orte verglichen. Zielstellung der Aufgabe ist es, Bilder in der Datenbank zu finden, die denselben Ort wie das aktuelle Bild zeigen. Dabei kann zusätzliches Vorwissen über aktuell mögliche Positionen genutzt werden. Während für weitestgehend statische, unveränderliche Umgebungen sehr mächtige Lösungen existieren, ist die Wiedererkennung von Orten in veränderlichen Umgebungen ein aktives Forschungsfeld. Veränderliche Umgebungen können entstehen durch einzelne dynamische Objekte (z.B. Menschen oder Fahrzeuge) oder durch systematische Veränderungen wie Wetter oder Beleuchtung. Unsere Arbeiten zielen auf den letzteren Fall, der auch in der obigen Abbildung illustriert ist: Dort ist der aktuelle Ort bereits zweimal in der Datenbank vorhanden, einmal unter anderer Beleuchtung und einmal unter einem anderen Blickwinkel. Ziel des beantragten Projektes ist es, neue Lösungen für die automatische Wiedererkennung von Orten unter solchen systematischen Veränderungen zu entwickeln.