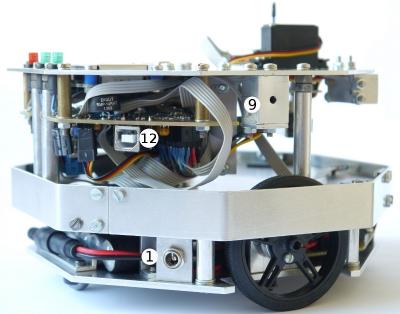
Für die Bewältigung des Labyrinthes ist der TUCBot mit einer Vielzahl an Schnittstellen und Sensoren ausgestattet. Zusätzlich können über einen DSUB-15-Anschluss auf der Oberseite weitere Module angeschlossen werden. Im Folgenden sind die einzelnen Sensoren und Benutzerschnittstellen kurz erläutert:
(1) Akku und Ladebuchse
Das Programmieren des TUCBots bei niedrigem Akkustand ist unter allen Umständen zu vermeiden, andernfalls kann es passieren, dass der Mikrocontroller nicht mehr programmierbar ist!
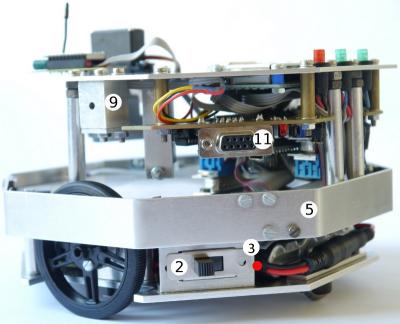
(2) Ein/Aus-Schalter
Zum Laden des Akkus muss der Schalter auf „aus“ stehen.
(3) Akkuspannungsanzeige
LED leuchtet: Akkuspannung zu niedrig (Motoren werden Abgeschaltet), LED blinkt: Akku fast leer, LED aus: Akku voll.
Siehe battery.
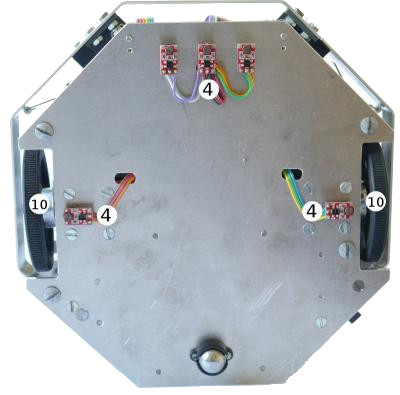
(4) Bodensensoren zur Linienerkennung
Siehe line sensors.
(5) Stoßstange
Siehe bumper sensors.
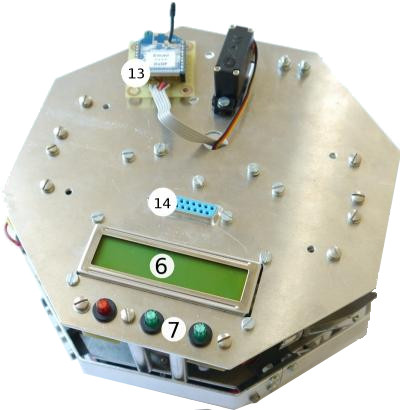
(6) LCD-Display
Das Display besitzt 2 Zeilen mit je 16 Zeichen.
Siehe display.
(7) Taster mit LEDs.
Die LEDs sind unabhängig vom Zustand des jeweiligen Tasters ansteuerbar.
Siehe buttons und leds.
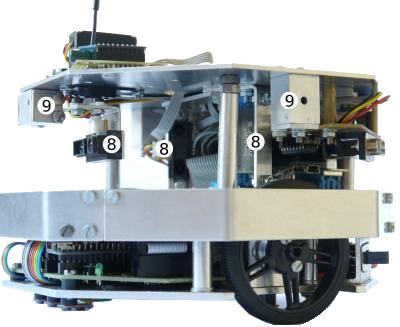
(8) Abstandsmesssensoren
Der mittlere Sensor ist über einen Servo drehbar montiert, dabei ist zu beachten, dass nur Entfernungen > 10 cm zuverlässig messbar sind.
Siehe sharp sensors.
(9) Infrarotsensoren
Siehe tsop sensors.
(10) Motoren mit Radencodern
Siehe motors und encoders .
(11) RS-232-Anschluss
Siehe uart.
(12) USB-Anschluss
Siehe uart.
(13) Xbee-Funkmodul
Als Empfänger stehen Xbee-Module mit Gehäuse und USB-Anschluss für den Anschluss an einen PC zur Verfügung.
Siehe uart.
(14) Erweiterungsanschluss
Siehe dsub15 connector.