AREIOM: Adaptive Research Multicopter Platform
Adaptive Multicopter Mission
Drone technologies offer new possibilities for complex flight applications as object inspection, area maintenance or agricultural support. Autonomous unmanned air-operations require high sophisticated methods for image processing and control. We develop methods for image based inspections, e.g. inspections of power lines. All inspection missions are implemented by autonomous flight control algorithms on our new adaptive research multicopter platform AREIOM. The AREIOM platform introduces several levels of control, provides high computation power and allows automated interaction between flight-control and mission-control.
In general the flight control is based on a predefined flight path. Therefore points of the flight path are defined by their GPS coordinates and the flight altitude is set. In addition a minimum distance to the object of interest and fundamental restrictions have to be considered.
The data of mission sensors and intelligent onboard data processing based on algorithms and powerful hardware are used for adaptive minimum distance control. In addition legal requirements for example No-Fly regions are included in the drone mission. So the flight path will be adapted based on this information.
AREIOM: Adaptive Research Multicopter Platform:
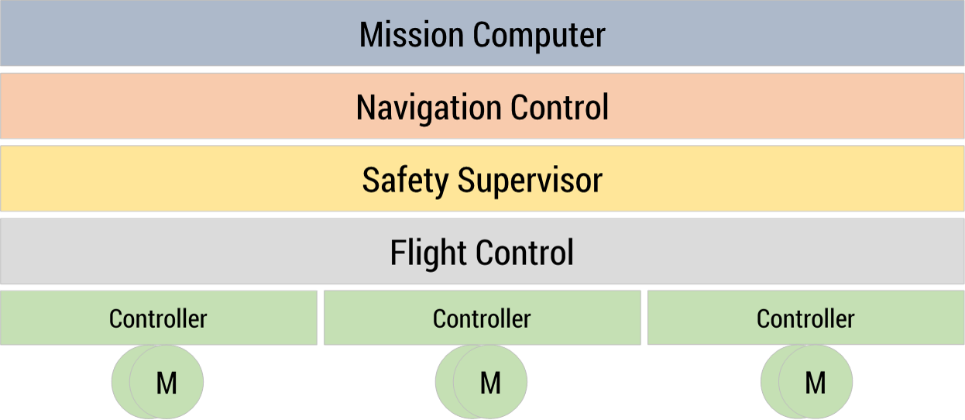
A multi-level architecture is implemented which separated independent functional layers based on criticallity requirements and safety classification.
Research activities:
- On-board real-time data exploitation of high-resolution mission sensor systems
- Decision making and active perception for navigation and automated mission execution
- Hardware-software-co-design for reliable flight control and multi-sensor signal processing
- Mission safety supervision to guarantee anytime safe autonomous mission execution
- FPGA-based hardware-acceleration for energy-efficient, high-performance on-board computing
Demonstrator: Hexcopter HP-Y6V2
Application:
- Vision-based inspection of wind turbines, photovoltaic systems, and power transmission lines: project APOLI
- Aerial photogrammetry (2D/3D building/object reconstruction, area documentation)
- Exploration and surveillance of large-size areas or regions with hard accessibility
- Disaster and emergency relief (e.g., flooding, forest fire)
- Transportation of lightweight goods and payload (e.g., small parcels, medicine)