Research Focus Human Maschine Interaction
Assisted Assembly
Assisting adaptive robot systems are not only beneficial for human machine workplaces during various assembly tasks, but also for tasks promoting home automation or nursing and care. The professorial chair develops methods that enables the robot to assist humans; the robot can be understood as being a third hand during assembly tasks or can simply pass individual parts to the human worker. It is important to guarantee simple programming and safe interactions between humans and machines.

Virtual force fields
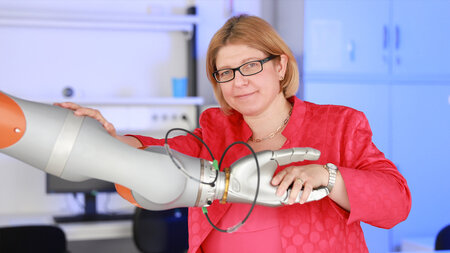
Hand-guided robots are part of industrial processes when it comes to supporting human workers during handling and lifting heavy loads. This technology is classified part of the overall concept of human-robot-interaction (HRI), where humans and robots share the same workplace. The aim of the ongoing work is to simplify the robot handling for the user and to work with it more intuitively.
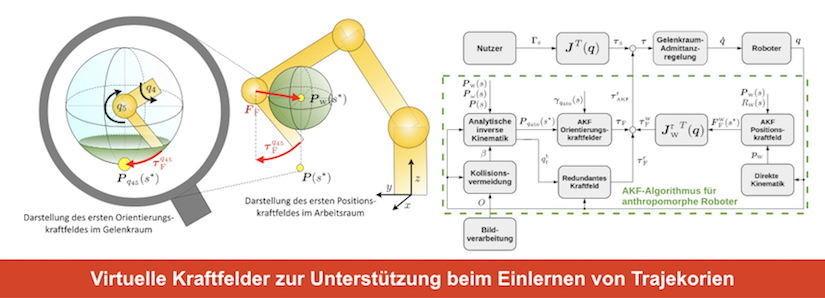
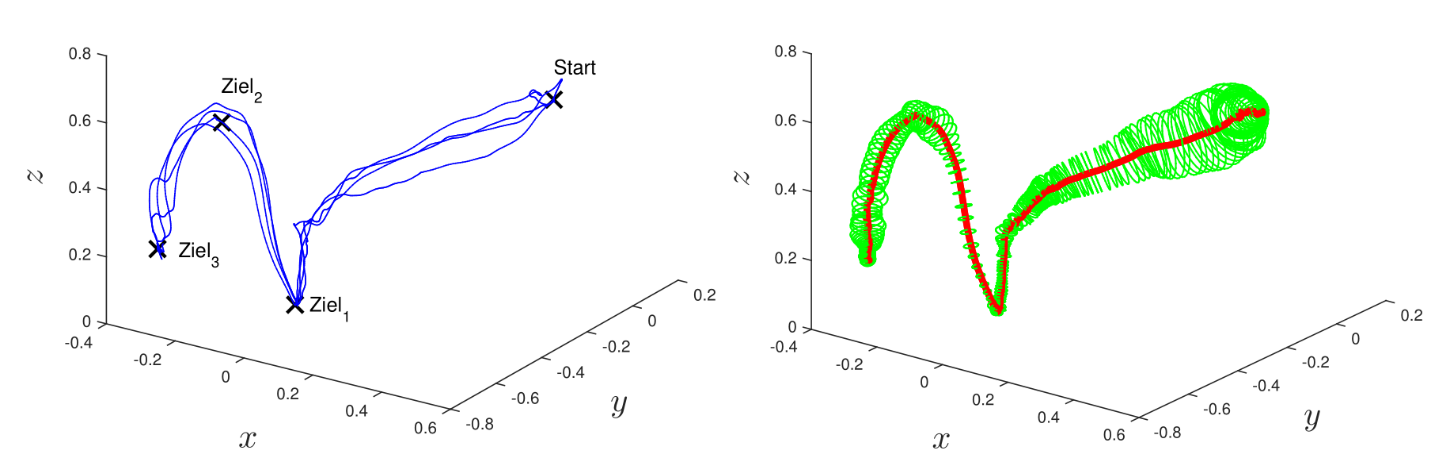
For this purpose, assisting force fields that are composed of algorithms with a learning and implementation phase, have been developed. Within the learning phase, the algorithm records movement data of skilled human workers during a specified task, see graph 1a (blue paths). Based on this data a virtual force field, that guides the user onto the paths of the skilled human worker, is generated in the implementation phase, see graph 2b (red reference path and green force field). Three different force fields have been developed: the tunnel-shaped virtual force field (TVFF), the assisting-virtual force field (AVFF), and the assisting-virtual force field for anthropomorphic robot arms. The TVFF influences the end effector of the robot and is to be used for all types of robots. The AVFF is an extended version of the TVFF and influences both the position and the orientation of the end-effector. This force-field is applied to the handling of industrial heavy-load robots by users, see top. Graph 2 shows the design of the AVFF. In order to make this force-field accessible to the typical light-weight robots in HRI, it has been equipped with anthropomorphic light-weight robot arms making it adaptable. Additionally, the force-field dependent variable impedance variation has been introduced.
Augmented Reality
The professorial chair develops assisting robots for humans. Using methods of augmented reality, the team synchronizes work processes between humans and machines in order to reflect on production steps between human and robot. As a result, one can work independently and flexible without needing to know assembly plans or the order of the various tasks of the assembly process in advance. Times for modification can be reduced.

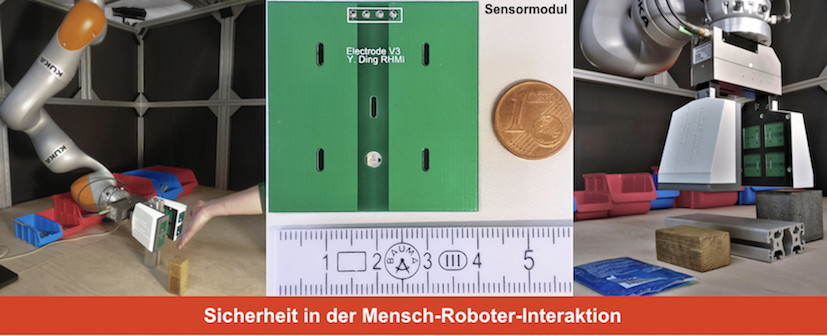
Safety within Human Machine Interaction
Besides new robot joints, that increase safety standards within human machine interaction, the team of the professorial chair utilizes various sensors that identify possible physical contact between humans and machines in time. Therefore, the outer layer of the robot can be equipped with distance sensors identifying a possible contact zone and initiating an avoidance manoeuver by the robot. Also it is possible to identify the conductivity with the help of capacitive sensors and the material of the close environment can be detected.