Forschungsschwerpunkt Mensch-Technik-Interaktion
Assistierende Montageroboter
Assistierende adaptive Robotersysteme sind nicht nur für Mensch-Roboter-Arbeitsplätze in der Fertigung hilfreich, sondern auch für die Bewältigung von Aufgaben zur Home-Automation oder in der Pflege. Hierfür entwickeln wir Methoden, damit Roboter dem Menschen optimal assistieren können. Dabei kann der Roboter als dritte Hand während der Durchführung von Montageaufgaben verstanden werden oder nur einzelne Bauteile zureichen. Eine einfache Programmierung des Roboters ist ebenso wichtig wie eine sichere Interaktion mit Robotern.

Virtuelle Kraftfelder
Handgeführte Schwerlastroboter werden in der Industrie eingesetzt um Arbeitern beim Heben von schweren Lasten zu unterstützen. Diese Technologie ordnet sich in das Gesamtkonzept der Mensch-Roboter-Interaktion (MRI) ein, bei welchem sich Mensch und Roboter einen gemeinsamen Arbeitsraum teilen. Ziel der vorliegenden Arbeit ist es, die Bedienung solcher Roboter für den Nutzer zu vereinfachen und intuitiver zu gestalten.
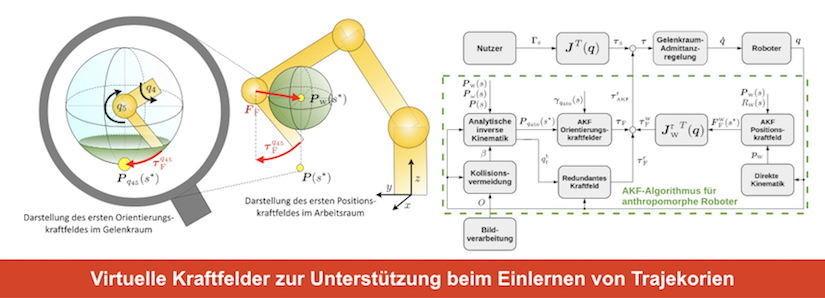
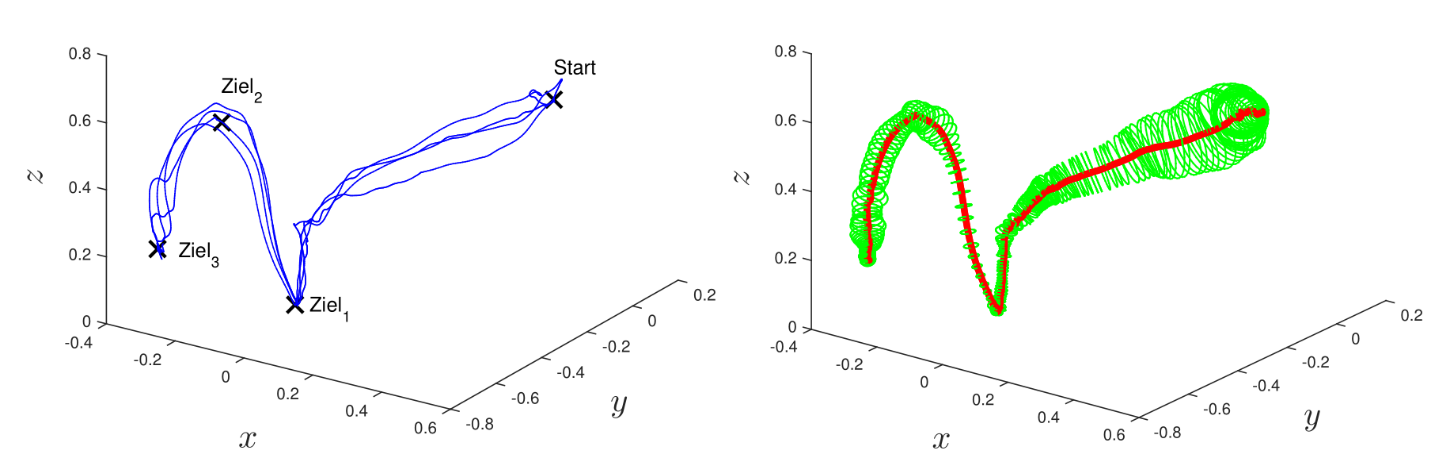
Zu diesem Zweck wurden die assistierenden Kraftfelder entwickelt, deren Algorithmus aus einer Lern- und einer Anwendungsphase besteht. In der Lernphase werden die Bewegungsdaten von erfahrenen Arbeitern innerhalb einer speziellen Arbeitsaufgabe aufgezeichnet, siehe Abbildung 1 a) (blaueb Pfade). Aus diesen Daten wird in der Anwendungsphase ein virtuelles Kraftfeld generiert, welches den Nutzer auf die Pfade der erfahrenen Arbeiter leitet, siehe Abbildung 2 b) (roter Referenzpfad und grünes Kraftfeld). Es wurden drei verschiedene assistierende Kraftfelder entwickelt: das tunnelförmige virtuelle Kraftfeld (TKF), das assistierende virtuelle Kraftfeld (AKF) und das AKF für anthropomorphe Roboterarme. Das TKF beeinflusst den Endeffektor des Roboters und eignet sich für alle Robotertypen. Das AKF ist eine Erweiterung des TKF und beeinflusst sowohl die Position als auch die Orientierung des Endeffektors. Dieses Kraftfeld wird eingesetzt, um die Nutzer der oben angesprochenen industriellen Schwerlastroboter zu unterstützen. Abbildung 2 zeigt den Aufbau des AKF. Um dieses Kraftfeld für die in der MRI weit verbreiteten Leichtbauroboter zugänglich zu machen wurde es für den Einsatz mit anthropomorphen Roboterarmen angepasst. Zusätzlich wurde die kraftfeldabhängige variable Impedanzregelung (KF-VIR) vorgestellt.
Augmented Reality
Für Menschen entwickeln wir assistierende Roboter. Dabei verwenden wir Methoden der Augmented Reality, um Arbeitsschritte zwischen dem Menschen und dem Roboter abzustimmen und dem Menschen entsprechende Arbeitsschritte anzuzeigen. Damit können Arbeiter für verschiedene Montageaufgaben sehr flexibel arbeiten und müssen nicht vorher die Montagepläne studieren oder die Reihenfolge bei der Montage vorher kennen. Es können die Umrüstzeiten reduziert werden.

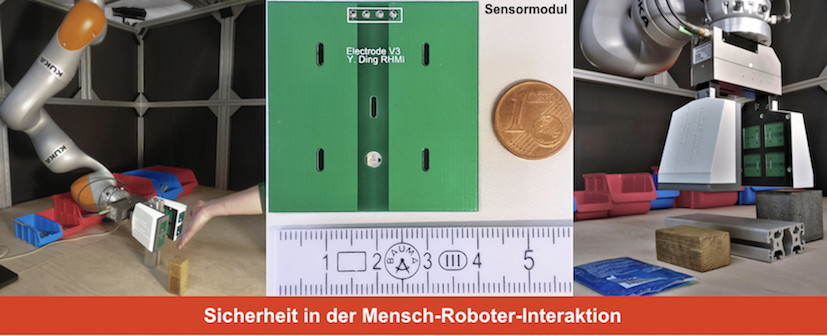
Sicherheit in der Mensch-Roboter-Interaktion
Neben neuen Robotergelenken, die die Sicherheit in der Mensch-Roboter-Interaktion erhöhen, setzen wir verschiedene Sensoren ein, damit ein eventueller Kontakt zwischen Mensch und Roboter rechtzeitig erkannt wird. Die Oberfläche des Roboters kann dabei mit Abstandssensorik ausgestattet werden, so dass der Kontakt frühzeitig erkannt wird und der Roboter eine Ausweichbewegung vornimmt. Des Weiteren kann die Leitfähigkeit mit Hilfe kapazitiver Sensoren bestimmt werden und das Material in der nahen Umgebung delektiert werden.